
Onze voet en enkel zijn cruciaal voor onze manier van lopen. Problemen aan deze complexe structuren hebben dan ook een groot effect op onze mobiliteit. Het in kaart brengen van de bewegingen in de voet- enkelgewrichten is een grote uitdaging. De afgelopen jaren hebben wij op het Amsterdam UMC onderzoek gedaan naar hoe deze bewegingen het beste gemeten kunnen worden tijdens klinische loopanalyses waarbij markers op de huid geplakt worden. Dit heeft niet alleen inzichten gegeven in de kwaliteit van de bestaande modellen, maar ook geleid tot een nieuw model: het Amsterdam Foot Model.
Complexiteit van de voet en enkel
Leonardo da Vinci beschreef de voet ooit als “a masterpiece of engineering and a work of art” [1]. Een kwart van de botten in een menselijk lichaam bevinden zich in de voeten. Iedere voet bestaat uit 26 botten, welke gekoppeld zijn in 33 gewrichten, waarvan de bewegingen gecontroleerd worden door meer dan 60 spieren en ligamenten. De voet is essentieel voor onze manier van lopen doordat het zorgt voor stabiliteit. Daarnaast dient het als een flexibele schokdemper bij het landen en als een rigide hefboom gedurende de afzet, wat leidt tot een efficiënte manier van voortbewegen [2, 3].
Er zijn veel aandoeningen die effect kunnen hebben op het functioneren van de voet en enkel, zoals diabetes, artrose, cerebrale parese of klompvoeten. Dit kan leiden tot slechtere mobiliteit en minder goed deel kunnen nemen aan het dagelijkse leven. Bovendien kunnen voetproblemen ook leiden tot problemen in meer proximale gewrichten zoals de heup, die weer verholpen kunnen worden als de voetproblematiek tijdig wordt verholpen [4]. Informatie over het functioneren van de voet, zowel staand (statisch) als tijdens beweging (dynamisch), kan artsen helpen bij het maken en evalueren van behandelbeslissingen. Statisch kan de voet beoordeeld worden door middel van beeldvormingstechnieken, bij voorkeur onder (lichaams-)belasting, zoals bij de opkomende belaste CT scans, waar recent over geschreven is in MT-Integraal [5]. Dynamisch kan de voetfunctie tijdens het lopen in kaart worden gebracht door middel van loop- of gangbeeldanalyses.
Klinische gangbeeldanalyses
Driedimensionale (3D) gangbeeldanalyses worden in de zorg gebruikt om het looppatroon van iemand in kaart te brengen. Bij een gangbeeldanalyse wordt er over het algemeen gebruik gemaakt van op de huid bevestigde retro-reflectieve markers. Deze markers worden tijdens het lopen gevolgd door meerdere infraroodcamera’s (Figuur 1). De markerposities over de tijd dienen als invoer voor een biomechanische model waarmee de gewrichtskinematica (d.w.z. gewrichtshoeken tijdens beweging) berekend kunnen worden.

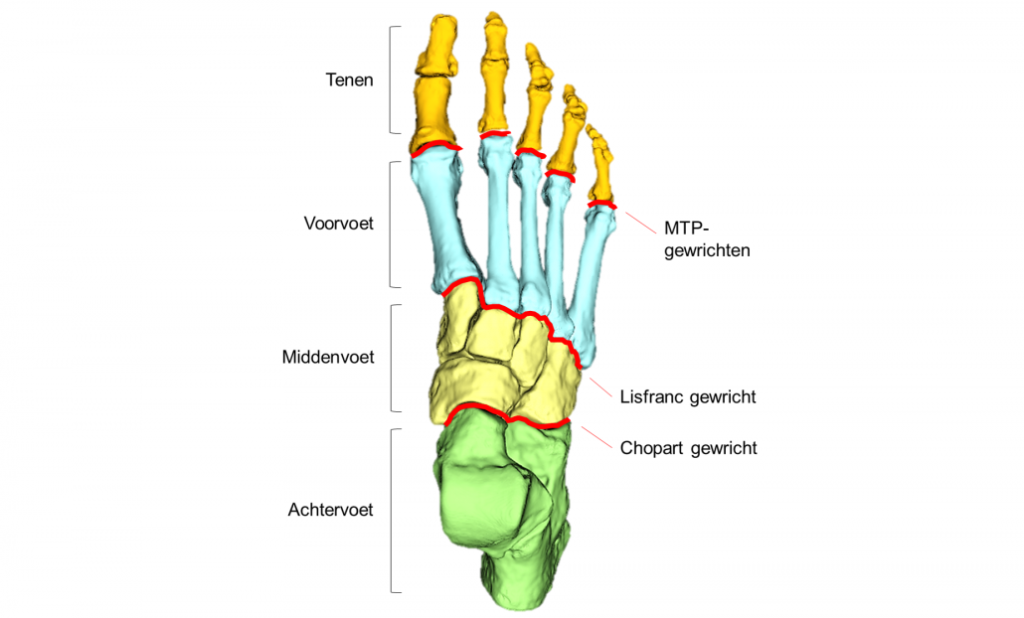
In een dergelijk model wordt het lichaam opgedeeld in segmenten, zoals het bovenbeen, onderbeen en de voet, waarvan wordt aangenomen dat er geen beweging binnen het segment mogelijks is (d.w.z. rigide segmenten). Dit is voor het onderbeen en bovenbeen natuurlijk het geval, maar voor de voet is dit geen correcte aanname gezien de 26 botten en 33 gewrichten in de voet die voor veel beweging kunnen zorgen. In specifieke biomechanische voetmodellen wordt de voet daarom vaak opgedeeld in de achtervoet, middenvoet, voorvoet en tenen (Figuur 2). Hierdoor kan er onderscheid gemaakt worden in bewegingen van de enkel, Chopart, Lisfranc en MTP-gewrichten. Voor ieder segment in het biomechanische model worden assenstelsels gedefinieerd op basis van de positie van tenminste drie markers. Deze assenstelsels hebben als doel om enerzijds de onderliggende botanatomie zo goed mogelijk te beschrijven en anderzijds een segment zo goed mogelijk te volgen tijdens beweging.
Huidige biomechanische voetmodellen
Tegenwoordig bestaan er veel (>40) biomechanische markermodellen van de voet waarmee de kinematica bepaald kan worden [6]. In veel bewegingslaboratoria wordt echter nog steeds een mono-segment voetmodel gebruikt. In deze modellen wordt de voet gezien als één rigide segment, wat ervoor zorgt dat de hoeken in het enkelgewricht worden overschat [7, 8] en er geen hoeken in de gewrichten van de voet worden gemeten. Een dergelijke mono-segment voetmodel kan voldoende zijn voor het beantwoorden van sommige vragen in gezonde proefpersonen, maar bij voet- en enkelproblemen is het gebruik van een multi-segment voetmodel cruciaal.
Van de vele multi-segment voetmodellen worden er twee het meest frequent gebruik in zowel de zorg als in het onderzoek [6, 9]. Dit zijn het Oxford Foot Model [10] en het Rizzoli Foot Model [11]. Wij hebben deze modellen vergeleken om beter inzicht te krijgen in hun verschillen [12]. Voor exact dezelfde stappen gaven de modellen verschillende uitkomsten. Echter was na deze studie nog niet duidelijk welke van deze modellen accurater was. Validatie studies van multi-segment voetmodellen zijn namelijk nog schaars [6, 9, 13].
Evaluatie van voetmodellen
Om inzicht te krijgen in het presteren van beide modellen zijn we gaan kijken naar het effect van meetfouten op de uitkomsten van de modellen (d.w.z. op de voetkinematica). Een bekende meetfout bij bewegingsanalyses in het algemeen zijn soft tissue artifacts. Er wordt namelijk een aanname gemaakt dat een deel van markers de bijbehorende botstructuur perfect volgen. Echter kan er beweging optreden tussen de op de huid geplakte marker en het onderliggende bot als gevolg van beweging door zacht weefsel, wat leidt tot een onnauwkeurige meting van de botbeweging, de zogenaamde soft tissue artifacts.
In een studie waarbij we gebruik maakten van belaste CT-scans hebben we deze artefacten gekwantificeerd voor markermodellen van de voet [14]. We hebben de rechter voet van 15 gezonde vrijwilligers in verschillende posities geplaatst, waarbij we de relatieve positie van de marker t.o.v. het botassenstelsel bepaalden (Figuur 3 en 4). Enkele markers werden geïdentificeerd met hoge waardes (max. 15 mm), zoals die op de laterale malleolus en proximaal op het posterieure deel van het hielbeen (Fig. 3D). Deze relatieve markerbewegingen zorgden voor fouten in gewrichtshoeken tot 6.8° op groepsniveau en individuele waardes van zelfs 11.8° graden.
 Figuur 3
Figuur 3

Figuur 3: Experimentele opstelling waarbij de voet in een gesimuleerd belasting apparaat wordt geplaatst (A). De voet wordt geplaatst op een plaat welke weggeduwd wordt en waarvan de kracht die daarvoor nodig is kan worden gecontroleerd. De voetplaat wordt in verschillende posities gebracht in waarvan twee voorbeelden zijn weergegeven in B (20° dorsaal flexie) en C (10° eversie). De markers met de grootste fouten als gevolg van de voet- en enkelbewegingen zijn weergegeven in D. met een rode cirkel. Panelen A, B en C zijn afkomstig uit Schallig et al. [14]
Figuur 4: Een globaal overzicht van de verwerking van de CT-scan data. Alle botten en markers zijn zichtbaar in de CT scan beelden. Vanuit deze beelden wordt ieder bot en marker apart gesegmenteerd, wat betekent dat er een 3D object van gemaakt wordt. Vervolgens kan de positie van een marker in een botassenstelsel bepaald worden en vergeleken tussen verschillende voet posities om de soft tissue artifacts te kwantificeren.
Een andere meetfout is het gevolg van het inconsistent plaatsen van markers. Als de voetkinematica over de tijd meermaals gemeten worden (bijv. voor en na een operatie of behandeling) worden de markers natuurlijk opnieuw geplakt. Het is echter lastig om de marker op precies dezelfde plek te plakken. De variabiliteit in markerplaatsing ligt rond de 5 mm [15-17]. Wij zijn gaan kijken naar de gevoeligheid van de voetkinematica voor inconsistente markerplaatsing [18]. Dit hebben we gedaan door bij een statische, staande opname de markers virtueel (d.w.z. in een softwareprogramma) in voor-achterwaartse, medio-laterale (zijwaartse) en verticale richting te verplaatsen en te bepalen hoe dit de oriëntatie van de anatomische assenstelsels en daarmee de gewrichtshoeken beïnvloedt. Voor het Oxford en Rizzoli Foot Model was er op ieder segment in ieder geval één marker aanwezig die een gevoeligheid had van meer dan 1 °/mm. Dit betekent dat bij een inconsistente markerplaatsing van 5 mm de gewrichtshoek verandert met 5°.
Amsterdam Foot Model
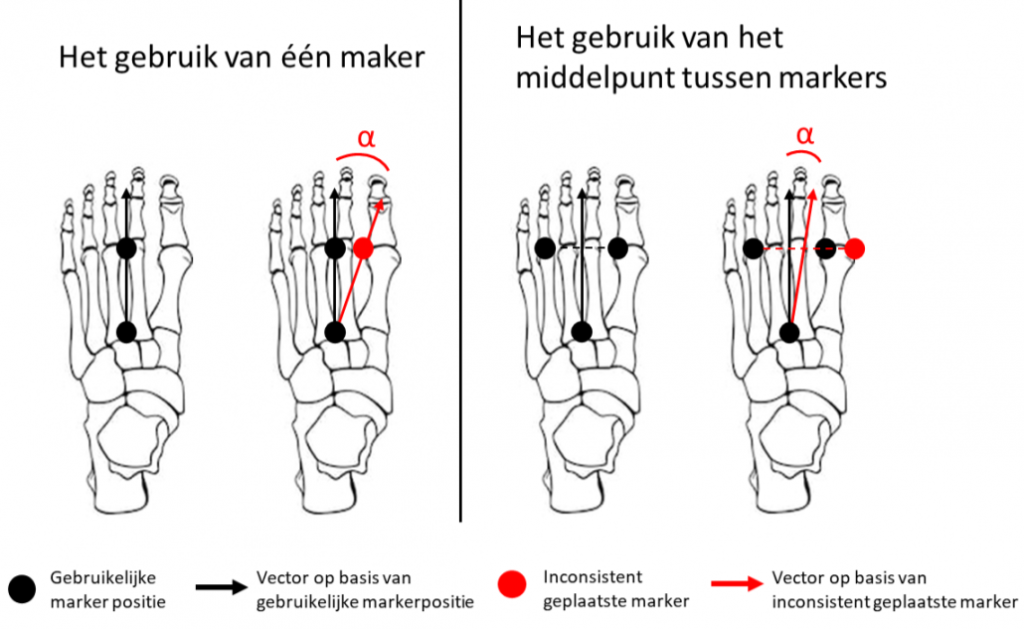
De aangetoonde meetfouten voor de bestaande voetmodellen zijn groter dan de 5°. Zo een verschil wordt voor gangbeeldanalyses vaak gezien als klinisch relevant, dat betekent dat het een verschil is wat de beoordeling van een arts zou kunnen beïnvloeden. Om potentiële klinisch misinterpretaties te voorkomen hebben we daarom een verbeterd voetmodel ontwikkeld, genaamd het Amsterdam Foot Model [19]. Dit model is een follow-up van bestaande marker voetmodellen, maar dan specifiek gericht op het minimaliseren van meetfouten. Een klinisch voet- en enkel-expertpanel bestaande uit artsen en wetenschappers is geconsulteerd om de klinische relevantie van het model en haar uitkomsten te waarborgen. In het Amsterdam Foot Model is het effect van soft tissue artefacten geminimaliseerd, door markers te selecteren met lage artefacten. Het Amsterdam Foot Model is daarnaast ook robuuster voor inconsistente markerplaatsing, doordat vaker het middelpunt tussen markers is gebruikt in plaats van individuele markers. De fout die wordt veroorzaakt in de oriëntatie van de anatomische assenstelsels wordt hiermee grofweg gehalveerd (Figuur 5). Voor het evalueren van het nieuwe voetmodel hebben we datasets gebruikt, waarmee we eerder ook de soft tissue artifacts en gevoeligheid voor markerplaatsing hebben bepaald. In deze nieuwe studie hebben we laten zien dat de meetfouten in het Amsterdam Foot Model kleiner zijn dan van de frequent-gebruikte Oxford en Rizzoli voetmodellen [19].
Alternatieve methodes voor het meten van voet- en enkelbewegingen
Het Amsterdam Foot Model kan voorlopig nog alleen gebruikt worden in een gecontroleerde omgeving zoals een bewegingslaboratorium in een ziekenhuis of revalidatiecentrum. Bewegingsanalyses zonder markers zijn in opkomst en ontwikkelen zich snel [20], waardoor bewegingsanalyses in thuissituaties of op een sportveld ook snel mogelijk zullen zijn. Deze analyses zijn echter nog niet sensitief genoeg om ook gedetailleerd naar de bewegingen in de voet te kunnen kijken.
Daarnaast is het Amsterdam Foot Model nog steeds een simplistische weergave van de voet, aangezien de voet wordt opgedeeld in enkele segmenten bestaande uit meerdere botten en gewrichten. Een opkomende techniek met veel potentie binnen de voet- en enkelbiomechanica is biplanaire videoradiografie, ook wel dubbele fluoroscopie genoemd [21]. Hiermee kunnen alle botstructuren in de voet en enkel worden afgebeeld tijdens het lopen; ook botstructuren die nu geen onderdeel zijn van de voetmodellen gebaseerd op markers, zoals de talus. Mogelijk zal deze techniek in de toekomst in enkele ziekenhuizen worden toegepast, echter brengt het veel meer logistieke uitdagingen met zich mee dan een bewegingslaboratorium waarin het Amsterdam Foot Model kan worden toegepast.
Conclusie
Het onderzoek dat we hebben uitgevoerd op het Amsterdam UMC was een samenwerking tussen verschillende disciplines, wat heeft geleid tot het verder helpen van het meten van voet- en enkelbewegingen tijdens het lopen. Onder de gegeven beperkingen van op markers gebaseerde loopanalyses, is het Amsterdam Foot Model op dit moment het meest accurate en betrouwbare voetmodel dat er beschikbaar is. De volgende stap is dat het model geïmplementeerd zal gaan worden in verschillende bewegingslaboratoria om artsen te ondersteunen in hun besluitvorming rondom voet- en enkelproblematiek tijdens het lopen en voor wetenschappelijk onderzoek.
Met dank aan
Het beschreven onderzoek dat is uitgevoerd op het Amsterdam UMC en dit artikel zijn mede tot stand gekomen door dr. ir. Josien van den Noort, dr. Marjolein van der Krogt, prof. dr. Mario Maas en prof. dr. ir. Jaap Harlaar.
Referenties
- Rinzler, C.A., Leonardo’s foot: how 10 toes, 52 bones, and 66 muscles shaped the human world. 2013: Bellevue Literary Press.
- Chan, C.W. and A. Rudins. Foot biomechanics during walking and running. in Mayo Clinic Proceedings. 1994. Elsevier.
- Morris, J.M., Biomechanics of the foot and ankle. Clinical orthopaedics and related research, 1977(122): p. 10-17.
- Stebbins, J., et al., Gait compensations caused by foot deformity in cerebral palsy. Gait Posture, 2010. 32(2): p. 226-30.
- Wellenberg, R., Belaste CT-opnames van de voet en enkel. 2021: MT Integraal.
- Leardini, A., et al., Multi-segment foot models and their use in clinical populations. Gait Posture, 2019. 69: p. 50-59.
- Pothrat, C., et al., One- and multi-segment foot models lead to opposite results on ankle joint kinematics during gait: Implications for clinical assessment. Clin Biomech (Bristol, Avon), 2015. 30(5): p. 493-9.
- Zandbergen, M.A., et al., The effect of mono- versus multi-segment musculoskeletal models of the foot on simulated triceps surae lengths in pathological and healthy gait. Gait Posture, 2020. 77: p. 14-19.
- Deschamps, K., et al., Body of evidence supporting the clinical use of 3D multisegment foot models: a systematic review. Gait Posture, 2011. 33(3): p. 338-49.
- Stebbins, J., et al., Repeatability of a model for measuring multi-segment foot kinematics in children. Gait Posture, 2006. 23(4): p. 401-10.
- Leardini, A., et al., Rear-foot, mid-foot and fore-foot motion during the stance phase of gait. Gait Posture, 2007. 25(3): p. 453-62.
- Schallig, W., et al., Comparing the kinematic output of the Oxford and Rizzoli Foot Models during normal gait and voluntary pathological gait in healthy adults. Gait Posture, 2020. 82: p. 126-132.
- Leardini, A., et al., ISB recommendations for skin-marker-based multi-segment foot kinematics. J Biomech, 2021. 125: p. 110581.
- Schallig, W., et al., The influence of soft tissue artifacts on multi-segment foot kinematics. Journal of Biomechanics, 2021. 120: p. 110359.
- Bishop, C., G. Paul, and D. Thewlis, The reliability, accuracy and minimal detectable difference of a multi-segment kinematic model of the foot-shoe complex. Gait Posture, 2013. 37(4): p. 552-7.
- Deschamps, K., et al., A novel device for standardizing marker placement at the calcaneus. J Am Podiatr Med Assoc, 2014. 104(1): p. 43-9.
- Mahieu, C., et al., Metatarsal arch deformation and forefoot kinematics during gait in asymptomatic subjects. Int Biomech, 2019. 6(1): p. 75-84.
- Schallig, W., et al., Marker placement sensitivity of the Oxford and Rizzoli foot models in adults and children. J Biomech, 2021. 126: p. 110629.
- Schallig, W., et al., The Amsterdam Foot Model: a clinically informed multi-segment foot model developed to minimize measurement errors in foot kinematics. J Foot Ankle Res, 2022. 15(1): p. 46.
- Kanko, R.M., et al., Inter-session repeatability of markerless motion capture gait kinematics. J Biomech, 2021. 121: p. 110422.
- Ye, D.Q., et al., In Vivo Foot and Ankle Kinematics During Activities Measured by Using a Dual Fluoroscopic Imaging System: A Narrative Review. Frontiers in Bioengineering and Biotechnology, 2021. 9.




{kind=link}