Paragrafen
MURAB
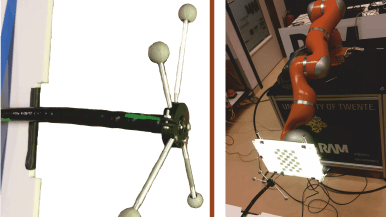
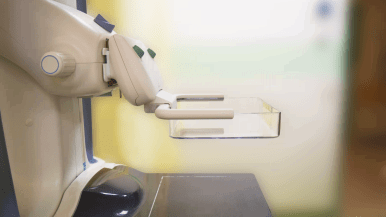
MURAB staat voor MRI and Ultrasound guided Robotic Assisted Biopsy. Zoals de naam aangeeft wordt naast MRI ook gebruik gemaakt van ultrasound, echografie. Een robotarm beweegt de probe rond de borst om een nauwkeurig 3D model van de borst op te bouwen. Hierbij wordt informatie van MRI, echografie, een camera en elastografie (berekeningen aan de elasticiteit van het weefsel) gecombineerd tot één model. Vervolgens kan de borst worden gesimuleerd en vervormd aan de hand van gemeten en voorspelde krachten en bewegingen. De laesie die oorspronkelijk alleen op MRI zichtbaar was, kan dankzij deze technieken realtime worden gevolgd buiten de MRI. Een robotgestuurde naaldgeleider stelt de radioloog vervolgens in staat om de laesie precies aan te prikken met een biopsienaald.
De combinatie van verschillende technieken en beeldmodaliteiten brengt grote potentiële voordelen. MRI heeft de beste inwendige beeldkwaliteit en kan sommige laesies als enige detecteren. Echografie en en cameraopnamen hebben het voordeel een stuk handzamer te zijn en de beelden snel te kunnen verversen. De kunst is om de verschillende technieken zodanig bij elkaar te brengen dat optimaal gebruik wordt gemaakt van alle voordelen. Een correcte co-registratie van MRI en ultrasound beelden is daarom van enorm belang. Hiervoor maken we o.a. gebruik van gekleurde markers op de borst welke in alle modaliteiten goed waarneembaar zijn.
Het MURAB project is een samenwerking tussen zeven instituten uit verschillende Europese landen. Vanuit de vakgroep Robotics and Mechatronics (RaM) van de Universiteit Twente werken dr. Françoise J. Siepel, prof.dr.ir. Stefano Stramigioli, dr. Ferdi van der Heijden, Marcel K. Welleweerd MSc en Vincent Groenhuis MSc hieraan. Daarnaast zijn er nog zes andere instituten betrokken: het RadboudUMC, de Ziekenhuisgroep Twente (ZGT), Siemens Nederland, de Medical University of Vienna uit Oostenrijk, KUKA uit Duitsland en de University of Verona uit Italië. Samen geven zij invulling aan wetenschappelijke, klinische en business-aspecten van het project. Het MURAB project is gefinancieerd binnen het Horizon 2020 programma van de Europese Unie, onder toekenningsnummer 688188.