
Een MRI-geleide borstbiopsie procedure maakt het mogelijk om laesies in de borst te biopteren welke alleen op MRI zichtbaar zijn, en niet op echografie of mammografie. De huidige handmatige procedure is niet ideaal omdat de procedure omslachtig en relatief onnauwkeurig is. De laesie wordt binnenin het MRI apparaat gelokaliseerd, maar buiten de MRI (blind) aangeprikt vanwege het gebrek aan toegankelijkheid in het MRI apparaat voor de radioloog. Het zachte weefsel kan daarbij verschuiven door ademhaling, spiersamentrekkingen en naald-weefsel interactie. Een groot aantal biopten met een dikke biopsienaald is noodzakelijk om een redelijk betrouwbare steekproef te verkrijgen, met relatief veel weefselschade tot gevolg. Nog steeds blijft bovendien het risico op een vals-negatieve biopsie aanwezig en de wens bestaat derhalve om de procedure nauwkeuriger en sneller te maken.
De vakgroep Robotics and Mechatronics aan de Universiteit Twente ontwikkelt verschillende prototypes van medische robots. Twee projecten zijn gericht op het MRI-geleid biopteren van laesies in de borst: het MURAB project en het Sunram project. Beide maken gebruik van een robot om de naald naar de juiste plek te sturen. Het belangrijkste verschil tussen beide projecten is dat MURAB buiten de MRI ruimte opereert, terwijl Sunram een robot binnen het MRI-apparaat plaatst.
MURAB
MURAB staat voor MRI and Ultrasound guided Robotic Assisted Biopsy. Zoals de naam aangeeft wordt naast MRI ook gebruik gemaakt van ultrasound, echografie. Een robotarm beweegt de probe rond de borst om een nauwkeurig 3D model van de borst op te bouwen. Hierbij wordt informatie van MRI, echografie, een camera en elastografie (berekeningen aan de elasticiteit van het weefsel) gecombineerd tot één model. Vervolgens kan de borst worden gesimuleerd en vervormd aan de hand van gemeten en voorspelde krachten en bewegingen. De laesie die oorspronkelijk alleen op MRI zichtbaar was, kan dankzij deze technieken realtime worden gevolgd buiten de MRI. Een robotgestuurde naaldgeleider stelt de radioloog vervolgens in staat om de laesie precies aan te prikken met een biopsienaald.
De combinatie van verschillende technieken en beeldmodaliteiten brengt grote potentiële voordelen. MRI heeft de beste inwendige beeldkwaliteit en kan sommige laesies als enige detecteren. Echografie en en cameraopnamen hebben het voordeel een stuk handzamer te zijn en de beelden snel te kunnen verversen. De kunst is om de verschillende technieken zodanig bij elkaar te brengen dat optimaal gebruik wordt gemaakt van alle voordelen. Een correcte co-registratie van MRI en ultrasound beelden is daarom van enorm belang. Hiervoor maken we o.a. gebruik van gekleurde markers op de borst welke in alle modaliteiten goed waarneembaar zijn.
Het MURAB project is een samenwerking tussen zeven instituten uit verschillende Europese landen. Vanuit de vakgroep Robotics and Mechatronics (RaM) van de Universiteit Twente werken dr. Françoise J. Siepel, prof.dr.ir. Stefano Stramigioli, dr. Ferdi van der Heijden, Marcel K. Welleweerd MSc en Vincent Groenhuis MSc hieraan. Daarnaast zijn er nog zes andere instituten betrokken: het RadboudUMC, de Ziekenhuisgroep Twente (ZGT), Siemens Nederland, de Medical University of Vienna uit Oostenrijk, KUKA uit Duitsland en de University of Verona uit Italië. Samen geven zij invulling aan wetenschappelijke, klinische en business-aspecten van het project. Het MURAB project is gefinancieerd binnen het Horizon 2020 programma van de Europese Unie, onder toekenningsnummer 688188.
Sunram
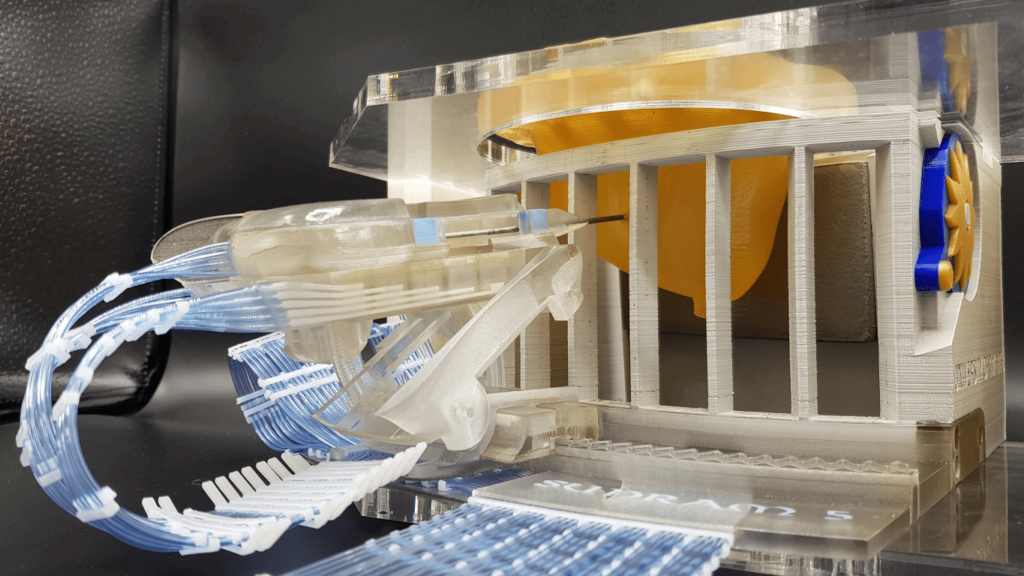
Sunram 5 is de vijfde generatie borstbiopsie robot voor in de MRI scanner. Na het maken van een scan van de patiënt kan de robot direct in actie komen door de naald naar de aangegeven positie te bewegen en het biopsiemechanisme te activeren. De patiënt hoeft niet meer herhaaldelijk in en uit de scanner te gaan en eventuele verschuivingen van de laesie kunnen relatief snel worden waargenomen en gecorrigeerd. Dit maakt het mogelijk om een dunnere naald toe te passen dan bij de huidige biopttechniek en resulteert in minder weefselschade. Ook de proceduretijd kan aanzienlijk worden verkort.
De belangrijkste uitdaging van een robot binnenin de MRI is het sterke magneetveld van de MRI scanner. Deze mag niet significant worden verstoord omwille van de veiligheid en beeldkwaliteit. De robot is derhalve geheel gemaakt uit kunststof en wordt aangedreven met perslucht. Zelfontwikkelde pneumatische stappenmotoren zetten luchtpulsen om in beweging, welke wordt geregeld door een bedieningspaneel buiten de MRI scanner. De biopsienaald is (nog) wel van titanium met (beperkte) negatieve invloed op de beeldkwaliteit, maar deze zou in de toekomst kunnen worden vervangen door een kunststof naald om het Sunram systeem volledig “MR Safe” te maken.
De Sunram 5 robot is gekoppeld aan een borstfixatiesysteem naar een oorspronkelijk ontwerp van Machnet. Hun product maakt het mogelijk om de borst in willekeurige posities vast te klemmen, wat de bereikbaarheid van ongunstig gepositioneerde laesies ten goede komt. De vijf eigen vrijheidsgraden van de Sunram 5 robot maken het vervolgens een koud kunstje om deze laesies te bereiken: de naald kan niet alleen lineair bewegen over drie assen, maar ook horizontaal en verticaal draaien. Zo kan de aanprikrichting worden geoptimaliseerd. De robot haalt theoretisch sub-millimeter precisie en ook in praktische experimenten werd een positionele precisie van ongeveer anderhalve millimeter behaald.
Het Sunram project begon als een afstudeeropdracht naar een idee van RaM, ZGT en Machnet B.V., waaruit de Stormram 1 was voortgekomen. Met het binnenhalen en beschikbaar stellen van financiering (o.a. een Pioneers in Healthcare voucher) kon een reeks opeenvolgende iteraties worden ontwikkeld. De oorspronkelijke naam “Stormram”, eigenlijk bedoeld als codenaam, was afgeleid van de specifieke parallelle kinematische structuur in bepaalde iteraties dat wel weg had van een middeleeuwse stormram. Met de toename in publiciteit van vooral de Stormram 4 werd de naam daarop gewijzigd naar Sunram 5 welke beter in het gehoor ligt en nog steeds de naam van de vakgroep (RaM) draagt.
De ontwikkeling van Sunram 5 is in handen van: Vincent Groenhuis MSc, dr. Françoise J. Siepel, Marcel K. Welleweerd MSc en prof.dr.ir. Stefano Stramigioli van het Robotics and Mechatronics (RaM) lab van de Universiteit Twente. Daarnaast is er een nauwe samenwerking met dr. Jeroen Veltman (radioloog bij Ziekenhuis Groep Twente), om het ontwerp zo goed mogelijk aan te passen aan de klinische praktijk, en met Abe van der Werf van Machnet B.V. voor het borstfixatiesysteem.
Toekomstige stappen
Zowel MURAB als Sunram zijn wetenschappelijke onderzoeksprojecten welke volop in ontwikkeling zijn. Het zijn nog lang geen volwaardige marktproducten, maar eerder prototypes (proof-of-concepts) welke laten zien wat er technisch mogelijk is. Uiteraard willen alle betrokkenen graag dat de prototypes niet in de onderzoeksfase blijven hangen, maar later ook worden doorontwikkeld tot marktproducten en in ziekenhuizen hun werk kunnen doen. Een goede samenwerking tussen academische, medische en zakelijke partijen, ook wel de “klinische innovatiedriehoek” genoemd, is daarbij erg belangrijk.
Over operatierobots, zoals bijvoorbeeld het Da Vinci systeem van Intuitive Surgical, is veel gezegd en geschreven. Strikt gezien is de Da Vinci geen robot, maar alleen een robotachtige manipulator welke op afstand door een arts wordt bediend. MURAB en Sunram gaan een (klein) stapje verder door bepaalde taken verder te automatiseren, maar ook hier blijft iedere handeling volledig onder controle van de arts.
Vertrouwen komt te voet en gaat te paard. Om een succesvolle klinische introductie van verregaande robotisering te bewerkstelligen moeten robots feilloos werken en bewezen beter zijn dan conventionele procedures. Dit is meteen de reden waarom procedures voor goedkeuring van nieuwe medische producten jarenlang kunnen duren, en misschien is dat maar goed ook. Door ons te richten op een zorgvuldige ontwikkeling van nieuwe biopsierobots proberen we een bijdrage te leveren aan betere diagnosetechnieken voor borstkanker in de toekomst.
Referenties
Groenhuis, V., Visentin, F., Siepel, F. J., Maris, B. M., Dall’alba, D., Fiorini, P., & Stramigioli, S. “Analytical derivation of elasticity in breast phantoms for deformation tracking.” International Journal of Computer-Assisted Radiology and Surgery (IJCARS), June 2018, doi:10.1007/s11548-018-1803-x
Groenhuis, V., Siepel, F. J., Welleweerd, M. K., Veltman, J., & Stramigioli, S. “Sunram 5: An MR Safe Robotic System for Breast Biopsy.” In Hamlyn Symposium on Medical Robotics, pp. 82-83, June 2018.




{kind=link}