
In de laboratoria van het Robotics Centre van de Universiteit Twente (UT) wordt dagelijks gewerkt aan revoluties voor de gezondheidszorg. Dit artikel belicht een selectie van onderzoeken en hun impact op de toekomst van de zorg middels roboticatechnologie. Centrale begrippen hierbij zijn gepersonaliseerde zorg, precisie, het integreren van diverse beeldvorming (imaging) en roboticatechnologieën, en het gebruik van robotica op een ‘chronische’ wijze: dagelijks, eerder als regel dan als uitzondering.
Robotica en kankerbestrijding: een Europese benadering op individueel niveau
Robotica heeft de potentie om een revolutie teweeg te brengen in de diagnose en behandeling van kanker door patiëntspecifieke beeldgestuurde robotsystemen te ontwikkelen voor minimaal invasieve interventies (behandelingen zonder te veel in het lichaam te moeten ingrijpen). Dit sluit aan bij het Europese bestrijdingsplan voor kanker, waarin vroege opsporing en effectieve, gerichte behandeling centraal staan om het sterftecijfer te verlagen en de levensverwachting van kankerpatiënten te verhogen. Dankzij verschillende beeldtechnologieën en robotica zijn de mogelijkheden om vroege opsporing en behandeling te optimaliseren enorm toegenomen.
Françoise Siepel, een onderzoeker op dit gebied binnen het Robotics and Mechatronics Lab, werkt aan drie specifieke onderzoekslijnen waarbij kunstmatige intelligentie (AI) en robotica worden ingezet om diagnostiek en behandeling mogelijk te maken. Ze doet dit samen met verschillende klinische en commerciële partners zoals Radboud UMC, Deventer ziekenhuis en AVL (Antoni van Leeuwenhoek), het Nederlands kanker instituut in Amsterdam. Hieronder worden drie voorbeelden genoemd.
1. Concentrische Tube Robots (CTRs)
Blaaskanker wordt geëvalueerd met cystoscopie, een methode om de blaaswand visueel te inspecteren. Concentrische Tube Robots (CTR’s), gecombineerd met optische coherentietomografie (OCT, een onderzoekmethode waarbij beelden worden gevormd van deels reflecterende materialen met behulp van een interferometer voor licht met een geringe coherentielengte) en camerabeelden, worden ontwikkeld om gerichte diagnostiek en interventie in holle organen als de blaas mogelijk te maken. Dit vermindert verkeerde uitlijning van tumorlocaties en optimaliseert de behandeling.
2. Slimme Navigatie binnen en buiten het Menselijk Lichaam
Er worden nieuwe besturingsmethoden ontwikkeld voor robotische systemen die autonoom hun positie kunnen bepalen binnen onbekende omgevingen, zoals bij kanker in de buik, blaas en borst. Deze systemen combineren technieken als SLAM (Simultaneous Localization and Mapping, een techniek waarbij het robotisch systeem een kaart van een onbekende omgeving opstelt en zich tegelijkertijd in dezelfde omgeving probeert terug te vinden) met real-time oppervlaktereconstructies, om zo de navigatie en precisie van Robot Assisted Minimal Invasive Systems (RAMIS) te verbeteren.
3. Robotarmen voor Echografie bij Borstkanker
Robotgestuurde echografiebeelden, gecombineerd met zeer gevoelige MRI (Magnetic Resonance Imaging), maken nauwkeurige naaldplaatsing mogelijk bij borstkanker. Dit biedt een alles-in-één-oplossing voor de diagnose en behandeling van tumoren.
Op Europees niveau leidt dr. Siepel DIH-HERO, een platform voor robotica in de gezondheidszorg dat innovatiehubs in 23 landen verbindt. Door dit netwerk worden nieuwe implementatietrajecten en analyses uitgevoerd om medische robottechnologieën verder te ontwikkelen.
Concentric tube robot (CTR) voor tumor inspectie in de blaas.
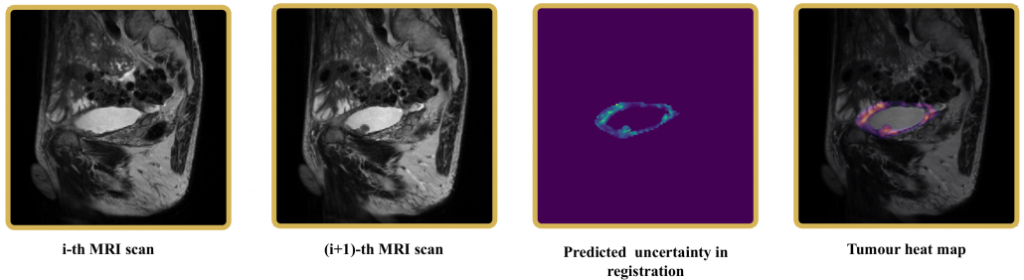
voorspelling of tumor heat map van Blaas MRI-scans.
Chirurgische Robotica: van macro tot micro
In het Surgical Robotics Laboratory (SRL) van de Universiteit Twente worden geavanceerde robottechnologieën ontwikkeld die het potentieel hebben om de chirurgische zorg ingrijpend te veranderen. Onderzoekers, onder wie Islam Khalil en Sarthak Misra ontwikkelen zowel macro- als micro-schaal robots om complexe procedures uit te voeren met verbeterde precisie en veiligheid.
Macro-Chirurgische Robots
Het Surgical Robotics Laboratory (SRL), onderdeel van het UT Robotics Centre, is een pionier in het ontwerp en de besturing van zowel macro-schaal, slangachtige medische apparaten als futuristische micro- en nano-schaal robots. Deze geavanceerde robots helpen chirurgen bij het uitvoeren van complexe procedures met verbeterde precisie, controle en veiligheid. Door het integreren van geavanceerde beeldvorming systemen, haptische feedback (terugkoppeling via tastzin) en draadloze manipulatie technieken, maken deze robotsystemen minimaal invasieve operaties mogelijk die de hersteltijd van patiënten aanzienlijk verkorten en de resultaten verbeteren.
Micro-Chirurgische Robots
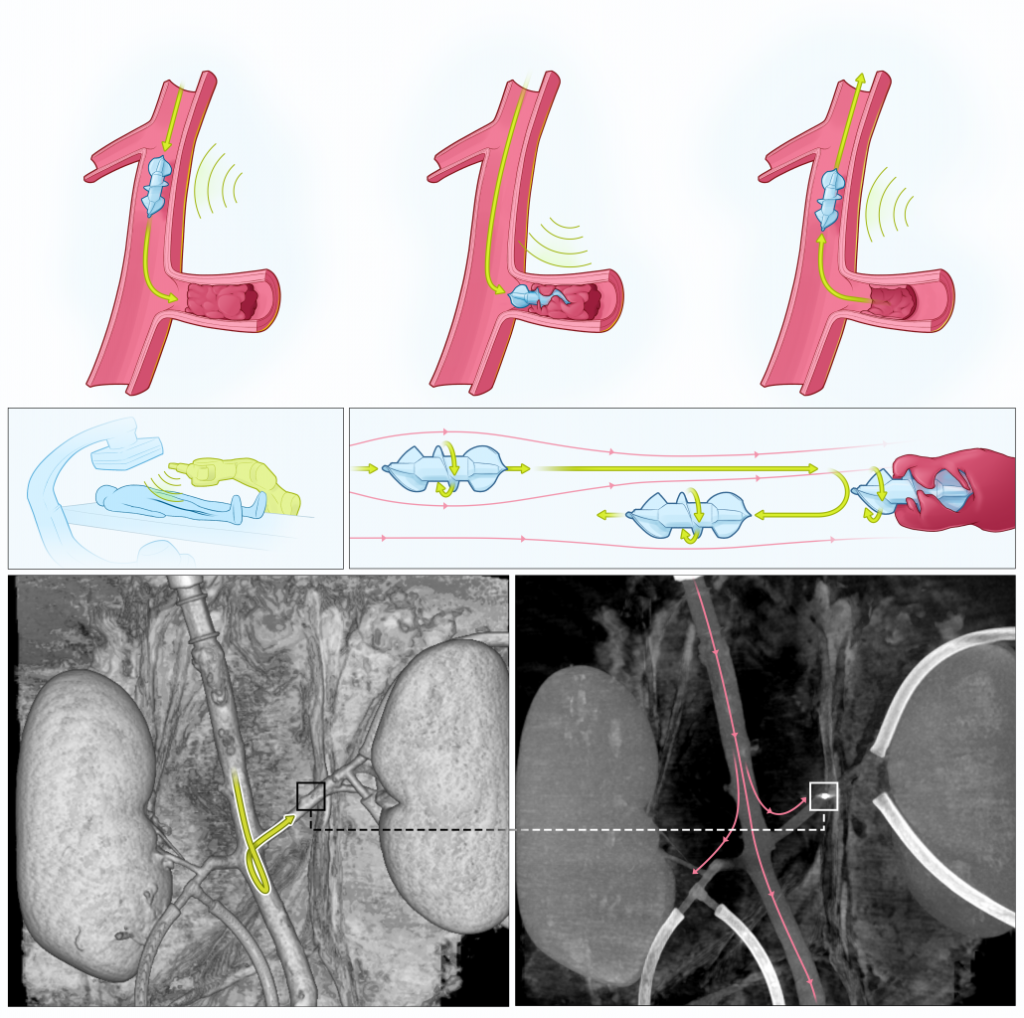
Een van de meest in het oog springende ontwikkelingen op dit gebied is de creatie van draadloze magnetische robots binnen het SRL Project ‘Wireless Clot Retriever for the Treatment of Acute Ischemia Stroke and Occlusions in Deep Seater Vessels’ [1]. Deze micro- en nano-schaal robots kunnen energie opwekken uit het lichaam of uit draadloze externe bronnen zoals magnetische velden of geluidsgolven. SRL vervaardigt bio-geïnspireerde micro-robots in de cleanroom van de UT, die in staat zijn om door de bloedbaan te zwemmen om gebieden te bereiken die moeilijk toegankelijk zijn met conventionele chirurgische hulpmiddelen. Recente studies hebben hun potentieel aangetoond bij taken zoals gerichte medicijnafgifte, verwijdering van bloedstolsels, hyperthermie (bij oververhitting), ablatie (bij hartritmestoornissen), bio-sensing (of lab-on-a-chip) en kunstmatige inseminatie. Dit laat zien dat deze technieken in staat zijn om behandelingen voor minimaal invasieve diagnostiek en chirurgie te verbeteren.
Een voorbeeld van een micro-robot
Innovatieve Gezondheidszorgprojecten
Naast de technologische uitdagingen bij diagnostiek en interventie, zijn de noodzaak om de uitkomsten voor patiënten te verbeteren en kostenefficiënter te werken belangrijke drijfveren van het onderzoek van het Robotics Centre. Onderzoekers Momen Abayazid en Giulio Dagnino en hun collega’s maken gebruik van kunstmatige intelligentie (AI), automatisering en geavanceerde robotica om oplossingen te ontwikkelen die hieraan actief bijdragen. Hieronder worden kort vier projecten besproken [2-6].
IMPACT-project
Binnen het IMPACT-project wordt gewerkt aan de overgang van op evidencebased naar intelligencebased gezondheidszorg door AI en automatische gegevensverzameling te integreren. Het doel is gepersonaliseerde behandelplannen te ontwikkelen en medische fouten te verminderen door robotische hulpmiddelen en realtime navigatiebeeldvorming te gebruiken.
ASSIST-project
Het ASSIST-project, een samenwerking tussen industriële, klinische en academische partijen (naast de Universiteit Twente ook Philips Healthcare, Barco en Leiden University Medical Centre) en richt zich op het optimaliseren van de workflow in beeldgestuurde therapie (IGT) systemen. Door handmatige handelingen te verminderen en te assisteren bij taken van de arts of deze te automatiseren, wordt de cognitieve belasting van artsen verlaagd, de efficiëntie verhoogd en worden de patiëntresultaten verbeterd.
MR-Guided Cardiovascular Robotics-project
Dit project richt zich op minimaal invasieve endovasculaire interventies voor hart- en vaatziekten. Het ontwikkelt een pneumatisch aangedreven MR-geleide robot, genaamd CathBot, die haptische feedback biedt en realtime MRI-geleiding gebruikt voor veiligere en nauwkeurigere procedures (Figuur 4). De arts bedient het masterapparaat vanuit de controlekamer terwijl hij kijkt naar MR-beelden die door het navigatiesysteem worden geleverd. De externe manipulator herhaalt deze bewegingsopdrachten in de interventiekamer en bestuurt de daadwerkelijke vasculaire instrumenten. Het MRI-navigatiesysteem is verbonden met de MR-scanner, beheert de communicatie tussen het robotplatform en de scanner, en toont realtime beeldgegevens. Neurale netwerken en trackingalgoritmen worden gebruikt om de endovasculaire instrumenten (bijv. geleidingsdraad) te detecteren en te volgen, en botsingen te detecteren om haptische feedback te bieden aan de arts via het masterapparaat.
IRE-project
Het IRE-project (Intelligent Robotic Endoscopes) heeft als doel het verbeteren van de huidige endoscopie technologie. Intelligente robotgestuurde endoscopen verbeteren de functionaliteit aanzienlijk, op basis van input van gebruikers en door middel van nieuwe biomechanische modellen en sensorische feedback. Dit leidt tot effectievere ingrepen in de gezondheidszorg.
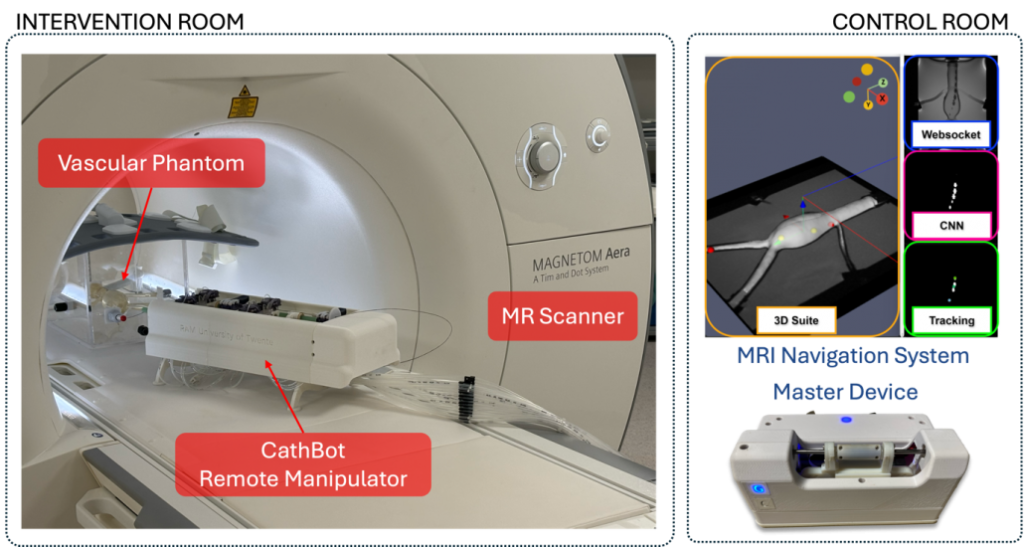
Het CathBot Robotic Platform
Draagbare robotica: innovaties voor gezondheid en welzijn
Bewegen is essentieel voor je gezondheid, en fysieke inactiviteit is een belangrijke oorzaak van sterfte wereldwijd. Draagbare robots, zoals exoskeletten en exosuits, verbeteren de mobiliteit en ondersteunen herstel na blessures. Deze technologieën worden steeds compacter, zachter en lichter, wat de weg vrijmaakt voor ‘chronisch gebruik’: technologie die je dagelijks gebruikt, zoals ook een bril of gehoorapparaat. Massimo Sartori, Herman van der Kooij en Edwin van Asseldonk van het Neuromechanical Modelling and Engineering Lab, resp. Wearable Robotics Lab, zijn pioniers in dit vakgebied [7-11].
Toekomst van draagbare robotica
Exoskeletten en exosuits hebben de potentie om chronische hulpmiddelen te worden die gebruikers ondersteunen in diverse situaties en omgevingen. Langdurig gebruik roept nieuwe vragen op over de interacties tussen robots en het spierskeletsysteem van de mens. Het begrijpen en optimaliseren van deze interacties is cruciaal om weefselvervorming te voorkomen en fysiologische eigenschappen van het lichaam te herstellen.
Overbruggen van het kennishiaat
Voor de ontwikkeling van effectieve draagbare robotsystemen is het essentieel om te begrijpen hoe het spierskeletsysteem reageert op mechanische veranderingen. Niet-invasieve sensoren, waaronder HD-EMG elektrodes (high-density electromyografie) en ultrasone transducers, en multiscale mechanistische modellen kunnen helpen om deze interacties nauwkeurig te voorspellen en te controleren.
Komende tien tot vijftien jaar
Deze aanpak kan de komende jaren leiden tot de ontwikkeling van robotsystemen voor cel- en weefsel-in-de-lus bioprotectieve strategieën. Oftewel: slimme manieren om robots en ons lichaam samen te laten werken, waarbij sensoren in de gaten houden hoe onze spieren en botten reageren op de bewegingen van de robot. Dit zodat de robot zich direct aan kan passen om te voorkomen dat het lichaam te veel of te weinig belast wordt. Dit helpt om blessures te voorkomen en het herstel van het lichaam te bevorderen.
Deze innovatieve robots kunnen de kwaliteit van leven aanzienlijk verbeteren en behouden. Ze kunnen chronische spierskelet-aandoeningen voorkomen, de kans op blessures voorspellen en structurele veranderingen in het spierskeletsysteem realiseren wanneer ze worden toegepast bij revalidatietrainingen. Dit vergroot eveneens de mogelijkheden voor meer behandelingen thuis, buiten ziekenhuizen of in revalidatiecentra. Naast een kostenbesparing is dit vooral ook prettig voor mensen die anders langdurig en vaak therapie nodig hebben.
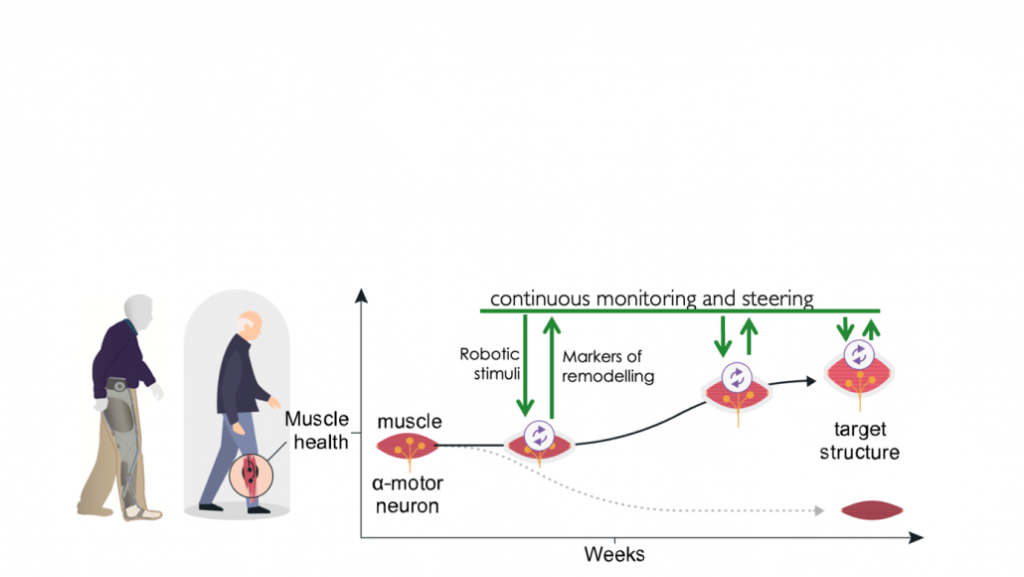
Draagbaar robot-exoskelet. Slimme draagbare technologie om de hele dag als een soort tweede huid te dragen. Hiermee kan dan continu de gezondheid van skeletspieren gemonitord worden
Conclusie
De integratie van robotica in de gezondheidszorg belooft een revolutie die diagnose, behandeling, revalidatie en dagelijkse ondersteuning aanzienlijk zal verbeteren. Door het combineren van geavanceerde technologieën en multidisciplinaire samenwerking wordt gepersonaliseerde, efficiënte en nauwkeurige medische zorg mogelijk gemaakt. Deze vooruitgang zal niet alleen de uitkomsten voor patiënten verbeteren, maar ook de algehele efficiëntie van de gezondheidszorgsystemen verhogen, waardoor we een gezondere en meer mobiele toekomst tegemoet gaan.
Technologisch is er veel mogelijk – nu en meer nog in de toekomst. Toch zal niet alles wat kan ook gebeuren. Naast kunnen, moet het ook nog mogen, haalbaar zijn (financieel en organisatorisch) én moeten we het willen.
Zo zijn high-tech oplossingen veelal kostbaar om te ontwikkelen en ook de uitontwikkelde technologie kan nog te kostbaar zijn om op grote schaal toegepast te worden als er ook goedkopere alternatieve oplossingen zijn.
Daarnaast zijn er mogelijk ook drempels in implementatie, acceptatie of gebruik. Niet iedere nieuwe technologie is ook een juiste oplossing voor alle betrokkenen. Patiënten kunnen moeite hebben met het gebruik ervan of een zorgprofessional heeft een andere voorkeur. Men vertrouwt de technologie nog onvoldoende of een nieuw technologie past niet in het bestaande systeem van werken. Wat doen we met clouddata? En, we willen natuurlijk zoveel mogelijk ‘handen aan het bed’, maar wat als iedere patiënt of zorgvelener een ander beeld heeft van ‘zoveel mogelijk’? Hoe duurzaam is het om alles van technologie te voorzien, wat toch zeldzame grondstoffen vraagt? Is hightech altijd de oplossing of biedt notech of lowtech een uitkomst?
Door anders naar bestaande processen en procedures te kijken, komen we ook tot nieuwe inzichten en andere oplossingsrichtingen. Het belang van de ontvanger van de zorg moet centraal staan: hoe bieden we die de best mogelijke zorg?
Interessant is ook de rol van preventie – wat als we de zorgvraag zelf kunnen verminderen, veranderen of verlichten?
Ook hiermee houden diverse onderzoekers uit verschillende technische en niet-technische disciplines van de Universiteit Twente zich dagelijks bezig.
Voor meer informatie over het onderzoek op het gebied van gezondheidszorg aan de Universiteit Twente, kijk op:
Robotics Centre University of Twente
UT’s Technisch Medisch Centrum
Thema Zorg op de Universiteit Twente
Referenties
[1] Funding agency: Health~Holland PPP-Allowance Agreement LSHI23002
[2] M. Selim, D. Dresscher & M. Abayazid, “A comprehensive review of haptic feedback in minimally invasive robotic liver surgery: advancements and challenges”, International Journal of Medical Robotics and Computer Assisted Surgery, 2024.
[3] A. Cordon Avila, M. Selim and M. Abayazid, “Deep Learning based acoustic measurement approach for robotic applications on orthopedics”, in Proceedings of the IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Heidelberg, Germany, 2024.
[4] D. Kundrat et al., “An MR-Safe Endovascular Robotic Platform: Design, Control, and Ex-Vivo Evaluation,” IEEE Trans. Biomed. Eng., vol. 68, no. 10, pp. 3110–3121, 2021, doi: 10.1109/TBME.2021.3065146.
[5] G. Dagnino et al., “In-vivo Validation of a Novel Robotic Platform for Endovascular Intervention,” IEEE Trans. Biomed. Eng., pp. 1–9, 2022, doi: 10.1109/TBME.2022.3227734.
[6] M. Reinok, G. Dagnino, and W. Brink, “Automated Passive Tracking for MR-guided Endovascular Interventions,” presented at the IEEE Medical Measurements & Applications, 2024.
[7] Sartori, M., & Farina, D. (2016). Neural Data-driven Musculoskeletal Modeling for Neurorehabilitation Technologies. IEEE Transactions on Biomedical Engineering, 63(5), 879–893. https://doi.org/10.1109/TBME.2016.2538296
[8] Sartori, M., & Sawicki, G. S. (2021). Closing the loop between wearable technology and human biology: A new paradigm for steering neuromuscular form and function. Progress in Biomedical Engineering, 3(2). https://doi.org/10.1088/2516-1091/abe3e0
[9] INTERACT (ERC Starting Grant): https://issuu.com/euresearcher/docs/interact_eur33_h_res
[10] ROBOREACTOR (ERC Consolidator Grant): https://cordis.europa.eu/project/id/101123866
[11] SWAG: https://swag-project.eu




{kind=link}