
Project MARCH, een van de vijf zogenaamde Dream Teams van de Technische Universiteit in Delft, werkt dit jaar een zelfbalancerend exoskelet. Ieder jaar zetten 27 studenten hun studie een jaar op pauze om hun te weiden aan dit project. Dit volledig vrijwillig en uit intrinsieke motivatie om mensen te helpen. Het exoskelet wordt namelijk gemaakt om mensen met een dwarslaesie weer te helpen op staan en te laten lopen.
Project MARCH
Project MARCH is acht jaar geleden begonnen als een van de Dream Teams van de TU Delft. Een Dream Team wordt volledig geleid door de studenten zelf, ze krijgen dus geen hulp vanuit docenten van de universiteit. Het enige waar de TU Delft in faciliteert is de locatie, namelijk de Dream Hall. Hier zitten alle Dream Teams bij elkaar op dezelfde locatie. Samen met EcoRunner, Hydromotion, Epoch en Hyperloop Delft wordt hier hard gewerkt aan de technische innovaties van de toekomst.
De rest van de hulp moet het team zoeken bij externe partijen, partners. Deze helpen met de benodigde financiën, onderdelen en consultancy. Er wordt dan ook geen winst gemaakt en ook de studenten krijgen geen financiële compensatie voor het werk dat ze doen. Allemaal hebben ze dezelfde intrinsieke motivatie om te werken voor het uiteindelijke doel: de kwaliteit van leven van mensen met een dwarslaesie te verbeteren.

Proces
Ieder jaar bouwt een team aan een nieuw exoskelet. Uiteraard wordt zoveel mogelijk kennis van het vorige team naar het nieuwe team overgedragen, maar er wordt wel een compleet nieuw exoskelet gebouwd. Om dit zo goed mogelijk te laten verlopen gaat het team door een aantal fases.
Als eerste de analysefase waarin de oude exoskeletten van Project MARCH en andere teams of bedrijven grondig worden bestudeerd. Wat werkt er wel? Wat werkt er niet? Welke kennis hebben we nodig of kunnen we gebruiken voor ons doel? Dit zijn allemaal vragen die geprobeerd worden te beantwoorden in de eerste weken van het project. Vrij snel hierna begint de conceptualisatiefase waarin de eerste ideeën worden uitgewerkt tot daadwerkelijke concepten. De concepten die in deze fase worden uitgewerkt dienen allemaal een mogelijke oplossing te zijn voor de problemen en uitdagingen die werden gevonden in de analysefase. Uiteindelijk moet er één concept gekozen geworden en tot in de puntjes worden uitgewerkt. Dit gebeurt in de embodiment fase. Vervolgens moeten alle onderdelen natuurlijk geproduceerd en in elkaar gezet worden, wat plaatsvindt in de subassembly en de assambly fase. Aan het eind van deze fases is het exoskelet af in zijn fysieke vorm, dit is vaak al in de maand april. Dit betekent dat de studenten in zeven maanden een compleet nieuw exoskelet met de nodige innovaties maken. Iets waar een bedrijf normaal gesproken meerdere jaren over doet.
Als het exoskelet dan daadwerkelijk staat kan er begonnen worden met het testen, eerst in de lucht, het zogeheten airgaiten. Daarna op de grond zonder een persoon erin, iets wat het team groundgaiten noemt. Als klap op de vuurpijl wordt er daarna getraind met iemand in het exoskelet. Dit is niet een student uit het team of zomaar iemand, maar iemand met daadwerkelijk een dwarslaesie die het aandurft om deze uitdaging aan te gaan samen met de studenten. Dit jaar wordt deze functie vervult door Koen van Zeeland. Deze fase wordt ook wel de trainingsfase genoemd, waarin zoveel mogelijk van de problemen worden opgelost en alles goed met elkaar wordt geïntegreerd.
Obstakels
Tijdens zijn jaar ligt de druk onwijs hoog. Een oud-chief engineer zei ooit: ‘Ik ken geen enkel bedrijf dat elk jaar 100% van zijn personeel ontslaat en vervolgens verwacht dat ze het jaar daarna een beter product maken’. Zo’n jaar gaat dan ook niet zonder slag of stoot. Uiteraard worden er op technisch vlak een hoop fouten gemaakt die vaak nog opgelost kunnen worden op de een of andere manier. Maar het lastigste van het deelnemen aan Project MARCH voor een jaar is het leren werken in een multidisciplinaire groep studenten.
Het huidige team, het achtste team, van Project MARCH bestaat uit 27 studenten met wel 11 verschillende studieachtergronden, van Mechanical engineering en Electrical engineering tot Klinische technologie en Bewegingswetenschappen. Tijdens al deze studies werk je alleen maar samen met studenten van je eigen studie, terwijl je tijdens Project MARCH moet samenwerken met mensen met allerlei achtergronden en functies. Dit levert nog weleens de nodige moeilijkheden op in het begrijpelijk maken van de problemen aan iemand zonder dezelfde kennis of achtergrond. Communicatief zet iedereen in het team dan ook grote stappen tijdens het project.
Het exoskelet van het achtste team
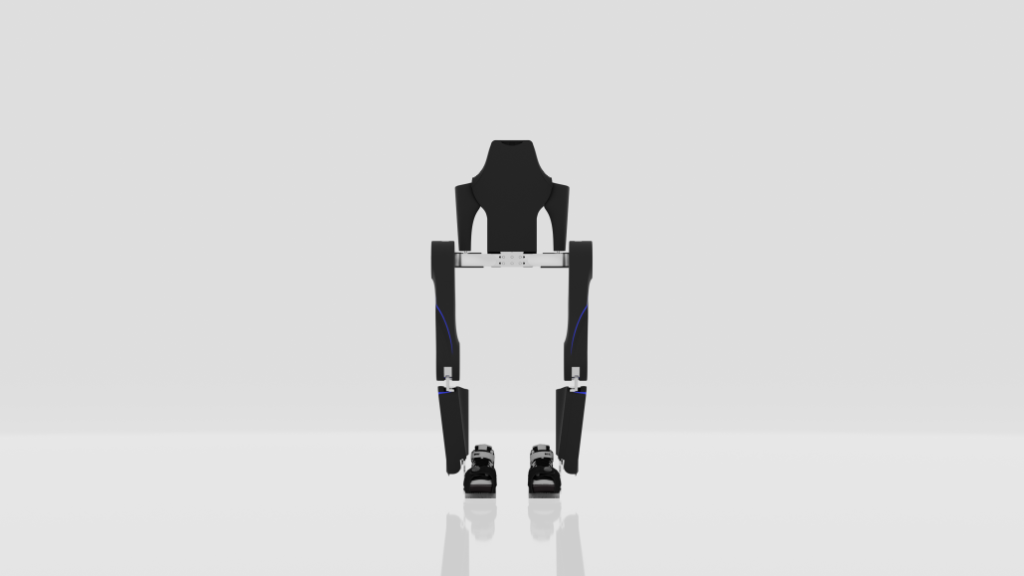
Ieder nieuw team maakt weer een nieuw exoskelet op basis van het zelfgekozen doel. Het doel van het huidige team is het zelf laten balanceren van het exoskelet. Tot voorheen liep de piloot, de gebruiker van het exoskelet altijd met behulp van krukken om zichzelf in evenwicht te houden. Het huidige team wil deze krukken weg gooien en weer lopen zoals de meeste mensen, gebalanceerd.
Dit klinkt misschien niet zo lastig, we lopen immers allemaal gebalanceerd en zonder krukken. Maar voor een robot is dit zo makkelijk nog niet, en gek genoeg maakt de piloot in het pak het nog eens extra moeilijk. De piloot zorgt namelijk voor allerlei niet te voorspellen bewegingen, hij kan zijn bovenlichaam opeens draaien of bijvoorbeeld naar voren buigen. Dit is iets wat het exoskelet niet kan voorspellen maar wel op moet anticiperen om de balans te behouden. Hier snijden we gelijk de twee belangrijkste punten aan van het zelfbalancerend maken van het exoskelet: het moet namelijk kunnen voelen of hij in balans is of niet, als dit niet het geval is moet hij weten hoe en op welke manier hij moet corrigeren om wel weer in balans te geraken.
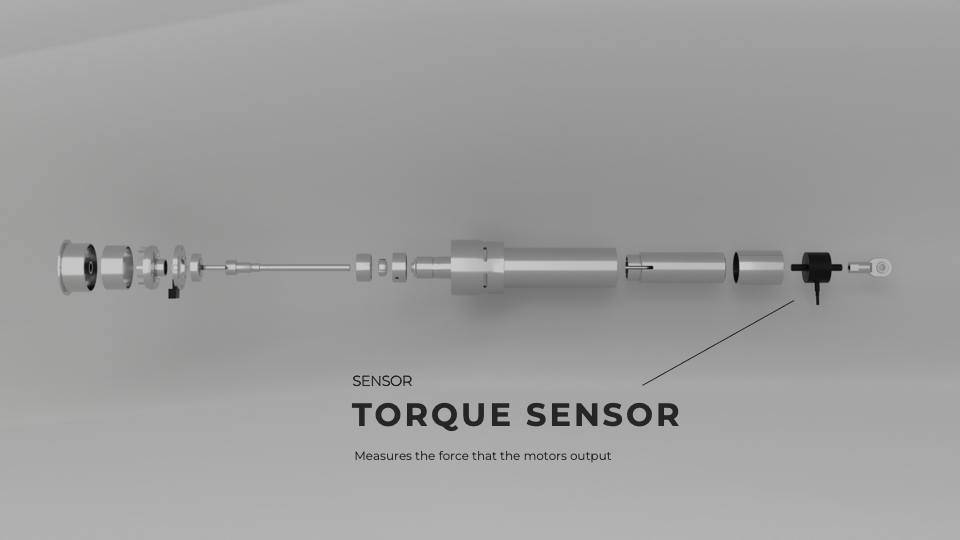
Dit heeft het team opgelost door allerlei sensoren in het exoskelet te integreren. De belangrijkste zijn torque sensoren, druksensoren in de schoenzolen en zogenaamde IMU-sensoren. De torque sensoren meten hoeveel kracht elk gewricht levert om een bepaalde beweging te maken. Als dit niet overeenkomt met de voorspelling dan weet het exoskelet dat zijn voet tegen bijvoorbeeld een stoeprandje aan het duwen is. Door de torque sensoren weet het exoskelet dan dat hij geen extra kracht moet gaan zetten waardoor hij uit balans zou geraken.
De volgende sensoren die zijn toegepast zijn de druksensoren in de zolen van de voeten. Bij ons mensen is druk onder onze voeten een van de drie manieren waarop wij bepalen of we in balans zijn. Dit noemen we proprioceptie. Samen met het evenwichtsorgaan en zicht zorgen deze drie onderdelen ervoor dat we in balans blijven. Ook in het exoskelet maken we gebruik van deze proprioceptie doormiddel van de druksensoren. Deze sensoren kunnen meten op welk deel van de voet veel of weinig druk staat. Op basis daarvan kan de software berekenen of het exoskelet naar voren, naar achteren, naar links of naar rechts geleund staat.

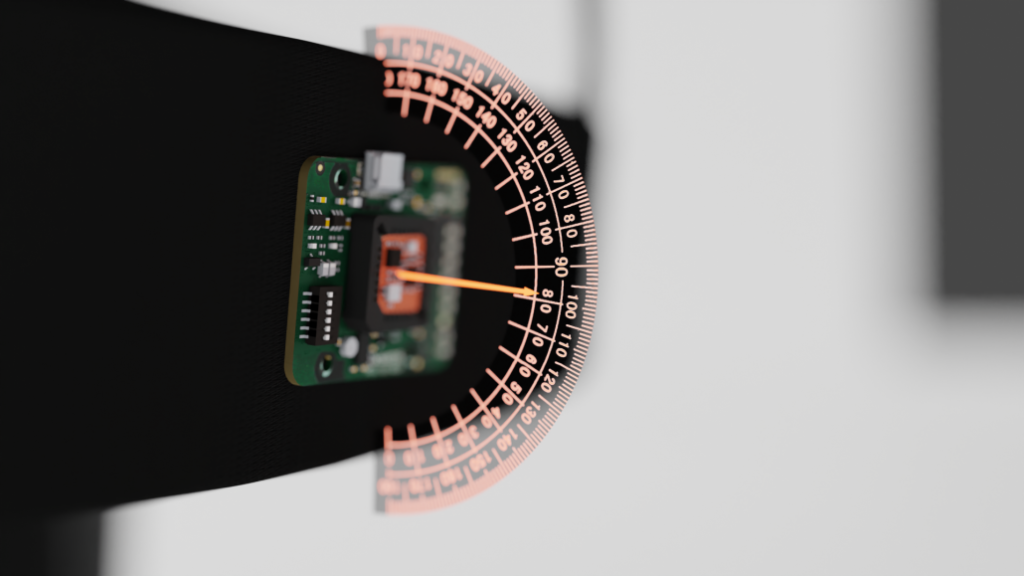
De laatste sensor is een IMU (inertial measurement unit), die erg lijkt op een gyroscoop. Het team maakt gebruik van twee van deze IMU-sensoren, één in het exoskelet en één op de borst van de piloot Koen. Hiermee kan vervolgens de oriëntatie van het exoskelet en Koen bepaald worden en vooral hoe deze zich tot elkaar verhouden. Dit is waardevolle informatie aangezien het exoskelet wel in balans kan zijn maar als de piloot daarboven helemaal naar voren gebogen is, ze samen alsnog om zullen vallen.
Uiteraard zijn er mechanisch ook een hoop verbeteringen doorgevoerd. Zo is het massamiddelpunt van het exoskelet meer in lijn gebracht met dat van de piloot in het exoskelet, zijn de gewrichten opnieuw ontworpen zodat er sneller gereageerd kan worden op onbalans en is de elektronica een stuk sneller geworden zodat de informatie van de sensoren sneller aan zal komen bij de gewrichten.
Als al deze technische innovaties worden doorgevoerd en de studenten van het team de obstakels van het leren communiceren en samenwerken overwinnen wordt er op 21 juli het eerste zelfbalancerend exoskelet van Project MARCH gepresenteerd aan de wereld. Dit zal een grote stap zijn in de zelfredzaamheid van mensen met een dwarslaesie. De piloot van dit jaar heeft al gezegd dat hij een traantje zal moeten wegpinken op het moment dat hij echt zonder krukken zal kunnen lopen. Dit is iets wat alle studenten in het team extra motiveert om nog een forse stap harder te werken voor Koen.




{kind=link}