
Lopen is een belangrijk onderdeel van het dagelijks leven. Neuromusculaire aandoeningen kunnen leiden tot zwakte of uitval van spieren, waaronder de kuitspieren, wat het lopen moeilijk maakt. Enkel-voet orthesen (EVO) kunnen het lopen bij kuitspierzwakte verbeteren. Het effect van de EVO op het lopen hangt hierbij sterk af van hoe gemakkelijk deze buigt: de EVO-stijfheid. De beste EVO-stijfheid verschilt per individu. Maar, hoe stijf moet de EVO dan precies zijn om het lopen maximaal te verbeteren? Om dit voor de individuele patiënt te bepalen ontwikkelen we in het Amsterdam UMC momenteel verschillende technieken.
Gevolgen en behandeling van kuitspierzwakte
Bij veel neuromusculaire aandoeningen, zoals erfelijke polyneuropathieen (bijv. HMSN) en polio, zijn de kuitspieren aangedaan en verzwakt. Zwakte van de kuitspieren maakt het lopen moeilijk. Het looppatroon verandert en kenmerkt zich door het doorzakken in de enkel tijdens de stand fase (overmatige enkeldorsaalflexie, als de voet op de grond staat) en het lopen met gebogen knieën (overmatige knie-flexie) [1, 2] (figuur 1). Daarnaast is de afzet van de kuiten om het lichaam naar voren te bewegen verminderd. Deze veranderingen in het looppatroon leiden tot langzamer lopen, hoog energieverbruik en vermoeidheids- en instabiliteitklachten [3-5].
Om het lopen bij kuitspierzwakte te verbeteren worden enkel-voet orthesen (EVO’s) voorgeschreven in de revalidatiezorg. Een EVO is een onderbeenbeugel die om de voet en een deel van het onderbeen gedragen wordt en daarmee het enkelgewricht omvat. Bij kuitspierzwakte is het doel van de EVO om overmatige enkeldorsaalflexie te verminderen door het toevoegen van een passieve stijfheid aan de enkel. Door vermindering van dorsaalflexie kan de knie ook opstrekken. Men zakt dus minder door de enkel en loopt minder met gebogen knieën. Hierdoor kunnen de loopsnelheid en het energieverbruik verbeteren [6-8].
In de praktijk wordt een grote variatie aan EVO’s voorgeschreven, die variëren in mechanische eigenschappen (zie figuur 2) en daardoor in de effecten die ze hebben op het lopen. Zo is uit onderzoek bij mensen met kuitspierzwakte gebleken dat EVO’s voorgeschreven in de Nederlandse zorg bij de helft van de gebruikers de loopsnelheid en/of het energieverbruik niet meetbaar verbeteren [9]. Daarnaast stopt een deel van hen met het gebruik van de EVO omdat de nadelen niet opwegen tegen de voordelen [10, 11].
 Figuur 1: Personaliseren van stijfheid enkel
Figuur 1: Personaliseren van stijfheid enkel

Het belang van EVO-stijfheid
De variatie in effecten van EVO’s voor kuitspierzwakte op het lopen wordt mogelijk verklaard door verschillen in de EVO-stijfheid. De EVO-stijfheid is een maat voor de buigweerstand en wordt uitgedrukt in Newton*Meter per graad (Nm/graad). Met toenemende stijfheid geeft de EVO meer weerstand, waardoor de enkelhoek meer wordt beperkt. Dit zorgt ervoor dat de knie kan opstrekken en er minder belasting op de bovenbeenspieren is.
Hierdoor neemt het energieverbruik tijdens het lopen af. Echter, bij een te hoge stijfheid, belemmert de EVO de enkelbeweging te veel. Hierdoor neemt de afzetkracht verder af, wat een negatief effect heeft op het energieverbruik [6, 12, 13]. Het gevolg van deze effecten van de EVO stijfheid op het looppatroon is dat met toenemende stijfheid het energieverbruik tijdens lopen eerst daalt, een minimumwaarde bereikt, en bij nog verdere toename van de EVO-stijfheid weer stijgt [14].
Er bestaat dus een optimale EVO-stijfheid: de stijfheid die leidt tot het laagste energieverbruik tijdens lopen.
Effecten van personaliseren van de EVO-stijfheid
Idealiter zou elke patiënt een EVO moeten dragen met een voor hem of haar optimale stijfheid. De optimale stijfheid verschilt tussen patiënten, waarbij zwaardere personen en mensen met meer kuitspierzwakte een stijvere EVO nodig hebben [15, 16]. Echter, momenteel is er geen methode om op basis van deze kenmerken de optimale EVO te selecteren. Het gevolg hiervan is dat de gekozen EVO-stijfheid op basis van ervaring wordt bepaald en gemiddeld veel flexibeler is, ongeveer 1.5 Nm/graad, dan de individuele optimale EVO-stijfheid.
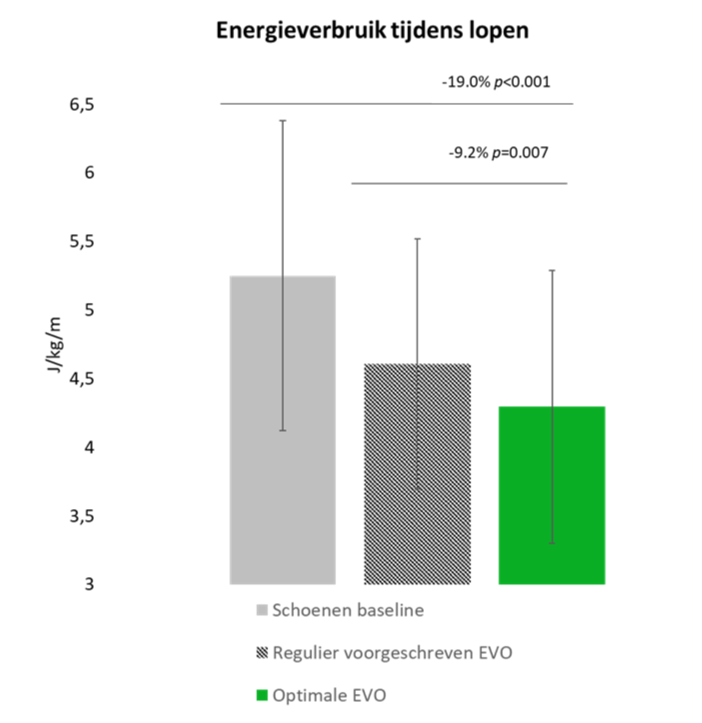
Het verschil in stijfheid tussen de individuele optimale EVO en EVO’s voorgeschreven in de Nederlandse revalidatiezorg is merkbaar voor de patiënt. In het PROOF-AFO onderzoek [17], uitgevoerd in het Amsterdam UMC in samenwerking met de TU Delft en OIM orthopedie en gesubsidieerd door het Prinses Beatrix Spierfonds, is onderzocht of het optimaliseren van de EVO-stijfheid de orthese behandeluitkomsten verbetert. Hiervoor is bij 37 mensen met kuitspierzwakte de EVO-stijfheid experimenteel geoptimaliseerd. Dit is gedaan door bij deze personen een loopanalyse en 6-minutenlooptest met 5 verschillende stijfheden af te nemen, op basis waarvan de optimale EVO-stijfheid voor afname in energieverbruik is geselecteerd. Vervolgens hebben de deelnemers deze stijfheid-geoptimaliseerde EVO gedurende drie maanden gebruikt in het dagelijks leven en werd het effect vergeleken met de reguliere EVO die participanten droegen op baseline.
Het bleek dat het energieverbruik tijdens het lopen 9.2% lager (p<0.001) en de loopsnelheid 5.2% hoger (p<0.001) was met de geoptimaliseerde EVO ten op zichte van de reguliere EVO (Figuur 3). Dit betekent een verdubbeling van het effect. Daarnaast werd het lopen als minder inspannend ervaren en hadden deelnemers minder vermoeidheidsproblemen in het dagelijks leven, wat de klinische meerwaarde en het voordeel voor de patiënt van het individueel optimaliseren van de EVO-stijfheid aangeeft [15].
Implementatie; Ontwikkeling stijfheid-verstelbare orthese
Op dit moment wordt in de huidige zorg de optimale EVO-stijfheid bepaald met behulp van een modulaire EVO (figuur 4). In de modulaire EVO zijn een kuitkap en voetplaat met behulp van twee schroeven verbonden met een koolstof veer aan de achterzijde van het been. Door deze veer te wisselen kan de stijfheid van de EVO worden gevarieerd. Echter, het wisselen van de veren en het meten van het looppatroon en energieverbruik met iedere stijfheid zijn beide erg tijdrovend, en duren tot vier uur per patiënt. Dit belemmert de grootschalige toepassing ervan in de revalidatiezorg.
Om het voorschrijven van stijfheid-geoptimaliseerde EVO’s te vergemakkelijken ontwikkelen we momenteel een stijfheid-verstelbare orthese, genaamd de ADJUST-AFO (Figuur 5). De ontwikkeling van de ADJUST-AFO is een publiek-private samenwerking tussen Amsterdam UMC, TU Delft, OIM orthopedie en Reade, gesubsidieerd vanuit het IMDI programma: Technologie voor bemensbare zorg – demonstratieprojecten en medegefinancierd wordt met PPS-toeslag door Health~Holland, Topsector Life Sciences & Health.
De ADJUST-AFO is niet bedoeld voor gebruik in het dagelijks leven maar wordt speciaal ontworpen voor het optimaliseren van de EVO-stijfheid. Na optimalisatie kan de stijfheid worden toegepast in een EVO. De stijfheid van ADJUST wordt aangepast tijdens de zwaaifase wanneer de kracht op de EVO het laagste is. De stijfheid verandert doordat een slider de effectieve lengte van de dorsale veer van de EVO verkort, dan wel verlengt. Een kortere effectieve veerlengte zorgt voor meer weerstand en dus een stijvere orthese.
Het voordeel van het tijdens het lopen variëren van de stijfheid is dat loopmetingen continu kunnen doorlopen. Het stoppen, manueel wisselen van de stijfheid en weer op gang komen met lopen is hiermee niet nodig. De optimalisatiemeting kan hierdoor worden verkort tot dertig minuten, wat de klinische toepassing haalbaarder maakt. De komende jaren hopen we de ADJUST-AFO te gaan uittesten in een aantal revalidatiecentra en ziekenhuizen in Nederland.
 Figuur 4 De modulaire EVO waarmee de stijfheid kan worden geoptimaliseerd
Figuur 4 De modulaire EVO waarmee de stijfheid kan worden geoptimaliseerd

De stijfheid wordt veranderd door de slider op en neer te bewegen. Hiermee wordt de effectieve veerlengte veranderd en daarmee de EVO-stijfheid.
Implementatie; voorspellen van de optimale stijfheid met behulp van simulaties
Naast de ontwikkeling van de ADJUST-AFO proberen we met hetzelfde consortium van Amsterdam UMC, TU Delft en OIM orthopedie, en ook gesubsidieerd vanuit het IMDI programma: Technologie voor bemensbare zorg, de optimale EVO-stijfheid te voorspellen. Dit heeft als voordeel dat er helemaal geen metingen meer noodzakelijk zijn. Het voorspellen van de optimale EVO-stijfheid proberen we te doen met behulp van voorwaartse simulaties in software met een spier-skelet model (Figuur 6). Bij deze simulaties wordt een looppatroon en energieverbruik tijdens lopen met en zonder EVO gegenereerd zonder inbreng van experimentele loopdata die bij patiënten gemeten moet worden. Om deze simulaties te genereren maken we gebruik van een spier-skelet model, een aansturingsmodel genaamd de controller en een optimalisatiecriterium, bij ons het energieverbruik tijdens lopen. Ons huidige spier-skelet model is 2D, en bevat per spiergroep één spier (met andere woorden, er is één knie-strekker). De spieren in het model worden geactiveerd door de controller. De controller heeft als belangrijkste aanname dat lopen voornamelijk op reflexen is gebaseerd. Op basis van de reflex-aansturing wordt een looppatroon gegenereerd. De reflexen en daarmee het looppatroon worden geoptimaliseerd naar een zo laag mogelijk energieverbruik. Door de optimalisatie wordt het looppatroon van het model beter en bevat het veel overeenkomsten met het lopen van mensen. Met deze methodiek kan het lopen van mensen met kuitspierzwakte en de effecten van EVO’s worden voorspeld [18, 19].
Met behulp van het simulatie-framework hebben we onderzocht hoe patiënt-karakteristieken zoals gewicht, mate van kuitspierzwakte en loopsnelheid de optimale stijfheid beïnvloeden. Dit is een eerste stap om de optimale stijfheid te kunnen voorspellen. Om dit te onderzoeken hebben we systematisch elk van deze factoren veranderd in het model. Vervolgens hebben we voor elk model gekeken welke gesimuleerde EVO-stijfheid het energieverbruik maximaal verlaagde. Uit de simulaties kwam naar voren dat met toenemende kuitspierzwakte en hogere loopsnelheid de benodigde EVO-stijfheid snel toeneemt. Bij het model met 90% verminderde kuitspierkracht was de optimale stijfheid twee keer zo hoog als bij het model met 40% verminderde kuitspierkracht. Lichaamsgewicht lijkt een interactie-effect te hebben met snelheid. Zwaardere mensen gaan langzamer lopen waardoor het effect van extra gewicht minder is (Figuur 7).
De komende jaren willen we deze principes gaan omzetten naar een behandelalgoritme waarmee een eerste indicatie over de optimale EVO-stijfheid kan worden gegeven, zodat dit kan worden toegepast in de revalidatiezorg.
 Figuur 6: Simulatie-methodiek
Figuur 6: Simulatie-methodiek

Conclusie
Onderzoek toont aan dat bij mensen met kuitspierzwakte het individueel optimaliseren van de EVO-stijfheid de effectiviteit van EVO’s om het lopen te verbeteren sterk kan verbeteren. In de huidige revalidatiezorg wordt een grote variatie van relatief flexibele EVO’s voor kuitspierzwakte voorgeschreven. Deze zijn ineffectief in het verbeteren van het looppatroon en verminderen het energieverbruik tijdens lopen suboptimaal. Het advies is om bij mensen met kuitspierzwakte de EVO-stijfheid altijd te individualiseren en het effect objectief te evalueren met behulp van looptesten. Dit proces is tijdrovend maar essentieel om het voorschrijven en het gebruik van ineffectieve EVO’s te verminderen.
Op dit moment wordt onderzoek gedaan naar het versnellen van het individueel optimaliseren van de EVO-stijfheid. Met behulp van simulaties en de ADJUST-EVO is het in de toekomst mogelijk de individueel optimale EVO-stijfheid sneller te bepalen. Hiermee kan de effectiviteit van de orthese-zorg verder worden verbeterd.
Dit artikel is mede tot stand gekomen door Merel Brehm en Frans Nollet. De onderzoeken beschreven in dit artikel zijn uitgevoerd binnen Amsterdam UMC in samenwerking met TU Delft en OIM orthopedie. De volgende onderzoekers waren hierbij betrokken: Niels Waterval, Merel Brehm, Frans Nollet, Jaap Harlaar, Rein Miedema, Manon Janse, Cor Meijneke, Marjolein van der Krogt, Kirsten Veerkamp en Thomas Geijtenbeek. De onderzoeken zijn gesubsidieerd door Prinses Beatrix Spierfonds en vanuit het IMDI programma: Technologie voor bemensbare zorg – demonstratieprojecten en medegefinancierd met PPS-toeslag door Health~Holland, Topsector Life Sciences & Health.




{kind=link}
Goed zo’n onderzoek.
Ik loop al jaren met een evo, behalve dat de stijfheid van belang is voor prettig lopen, is het ook erg belangrijk dat de afwikkeling goed is. Is de zool te stijf of te lang dan kun je niet goed afwikkelen. Bij elke stap voel je een soort rem/stop, dit geeft een schok in de knie. Mijn knieklachten maken het lopen onbehaaglijk.
MBT schoenen helpen goed bij de afwikkeling. Voor mij zijn de meeste evo’s te stijf. Verder krijg ik, als ik te lang op eenzelfde evo loop, smetplekken of botuitwassen door dynamische druk. Meestal op de hiel.