Ontdek hoe de inzet van robottechnologie inzicht kan bieden in een de oudste chirurgische behandeling op aarde. De geschiedenis van tandextractie gaat terug tot de Romeinse tijd, waar Aulus Cornelius Celsus (ca. 25 v.Chr. – 50 n.Chr.) een methode beschreef om tanden te trekken door ‘eerst het tandvlees los te maken en de tand vervolgens te verwijderen, bij voorkeur met de hand of met een tang’. In de negentiende eeuw werd een moderne extractietang geïntroduceerd die ontworpen was om krachten loodrecht op het bot uit te oefenen en de tand bij de hals vast te houden in plaats van bij de grootste diameter van de kroon.(1)
Ondanks verbeterde instrumenten, blijft tandextractie een delicate behandeling waar slechts zeer beperkt onderzoek naar is gedaan. Sinds de jaren zeventig zijn er slechts enkele pogingen ondernomen om de krachten tijdens tandextracties te meten, maar de meeste studies registreerden krachten slechts in een enkele dimensie en door een heterogene studieopzet zijn de uitkomsten niet goed met elkaar te vergelijken. Het gebrek aan wetenschappelijke vooruitgang in dit veld is opmerkelijk, vooral gezien de frequentie van deze procedures.(2)
Het gebrek aan fundamenteel inzicht in deze behandelingen is terug te zien in het onderwijs. Moderne leerboeken blijven beperkt tot basisinstructies zoals ‘rotatie’ of ‘wiegen’, vergelijkbaar met teksten die dateren van 2000 jaar geleden. In 2011 bleek uit een enquête onder studenten van 23 Europese tandheelkundige scholen dat tot 60% van de studenten vond dat hun kennis over extractietangen en hevels onvoldoende was. Preklinische trainingsmethoden blijken schaars en divers, en werden niet breed toegepast, waardoor studenten voornamelijk in klinische setting moeten oefenen (lees: direct op patiënten). Een studie in Groningen vond een toename in verwijzingen voor eenvoudige tandextracties naar de (duurdere) kaakchirurgen, mogelijk door verminderde klinische training in recentere jaren. Als verklaring wordt gegeven dat er minder exposure is voor studenten aan extracties, met name door de opkomst van preventieve tandheelkunde.(3, 4)
Deze achtergrond laat zien dat er een grote kenniskloof bestaat in ons begrip van tandextracties met directe gevolgen voor het onderwijs, wat de reden is geweest om hier verder onderzoek naar te doen.
Methode
In samenwerking met de afdeling cognitieve robotica van de TU Delft is een opstelling gebouwd in een poging om deze ‘kenniskloof’ te dichten. De aanpak richtte zich op het nauwkeurig meten van de krachten en bewegingen die ervaren kaakchirurgen uitoefenen tijdens het trekken van tanden.
Uitdagingen en ontwerp
Er was sprake van verschillende uitdagingen bij het ontwerpen van de meetopstelling. Kaakchirurgen gebruiken een combinatie van hoge krachten en subtiele bewegingen om een tand los te maken uit de kaak. Beweging en (rotatie)krachten dienen in drie dimensies gemeten te worden in hoog detail en in hoge frequentie.
Na meerdere sessies met clinici, werktuigbouwkundigen en computerwetenschappers werd gekozen voor een in vitro meetopstelling. Een van de grote concessies was dat in vivo metingen minder nauwkeurig en reproduceerbaar zouden zijn vanwege de mobiliteit van de patiënt en de beperkte ruimte voor sensoren. De opstelling is terug te vinden in afbeelding 1.
Robotopstelling
Voor de experimenten werden zeven verschillende extractietangen gebruikt, passend bij specifieke tandtypes. De tangen werden bevestigd aan de robot, die posities en oriëntaties van de tangen met sub-millimeter precisie registreerde. De robot heeft geïntegreerde koppel- en rotatiesensoren, wat hem geschikt maakt voor nauwkeurige metingen van externe krachten. Een ATI 16-bit Delta (gemonteerd onder de kaken) transducer registreerde krachten en torsies in zes assen, terwijl een webcam een videostream van de experimenten vastlegde.
Software-integratie
Het Robotic Operating System (ROS) werd gebruikt voor de software-integratie van de krachtsensor, de camera en de robot. ROS is een opensource platform dat hardware-integratie en robotbesturing vergemakkelijkt. Voor een soepele workflow tijdens de experimenten werd een grafische gebruikersinterface (GUI) ontworpen, waarmee alle componenten van de opstelling en de experimenten beheerd konden worden.
Experimentele opzet
De experimenten vonden plaats in een anatomisch laboratorium van het Amsterdam UMC, waarbij gebruik werd gemaakt van vers ingevroren kadaverkaken. De kaken werden zodanig verkleind dat ze in de houders pasten en zacht weefsel werd grotendeels verwijderd.(5)
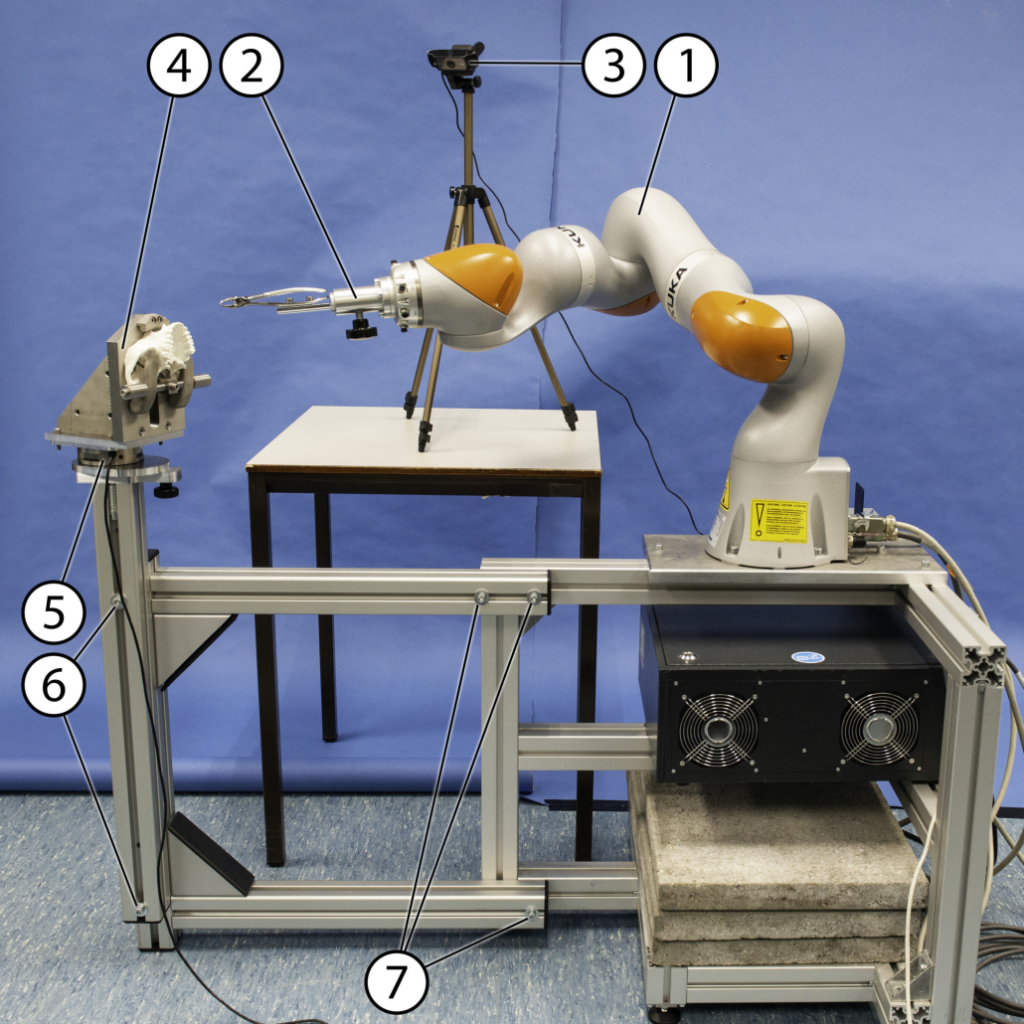
Overzicht van de opstelling. (1) robotarm (KUKA LBR iiwa 7 R800), (2) tanghouder (eigen ontwerp), (3) videocamera, (4) bovenkaakhouder, (5) krachtsensor (ATI 16 bit Delta transducer), (6) bouten om het frame verticaal af te stellen, (7) bouten om het frame horizontaal af te stellen.
Resultaten
De data van 110 experimenten op vers gevroren kadaverkaken zijn open access beschikbaar.(6) Hier volgt een samenvatting van enkele bevindingen, beginnend met de resultaten van krachten en bewegingsregistratie door de robot, gevolgd door de resultaten van het classificatiemodel dat gebruikt is om de data als geheel te analyseren.
Krachten en rotatiekrachten
De totale cumulatieve krachten tijdens tandverwijdering langs elke as werden gemeten. Gemiddeld waren deze 420 Ns. Het verwijderen duurde gemiddeld 20,1 seconden. De laagste cumulatieve krachten werden gevonden bij de bovenste centrale snijtanden (150 Ns), terwijl de hoogste waarden werden gemeten bij de onderste tweede kiezen (1061 Ns).
Richting van krachten en koppels
De opstelling maakt het mogelijk om ook de richting van de krachten te bepalen. Deze werden geanalyseerd in zes richtingen. In zowel de boven- als onderkaak bleken extrusieve en buccale krachten het meest dominant. Alleen bij de centrale bovenste snijtanden waren de intrusieve krachten meer uitgesproken.
Bewegingsdata
Afbeelding 2 toont typische verwijderingspatronen voor twee verschillende tanden.
Voor centrale snijtanden in de bovenkaak was beweging rond de longitudinale as het meest dominant, terwijl voor de eerste kiezen in de bovenkaak beweging rond de mesiodistale as dominant was. De parameter ‘asdominantie’ werd ontwikkeld om de relatieve dominantie van rotatie langs elke as te kwantificeren. Dit toonde een duidelijke dominantie van rotaties rond de longitudinale as, vooral in het frontale gebied van de bovenkaak.(7)
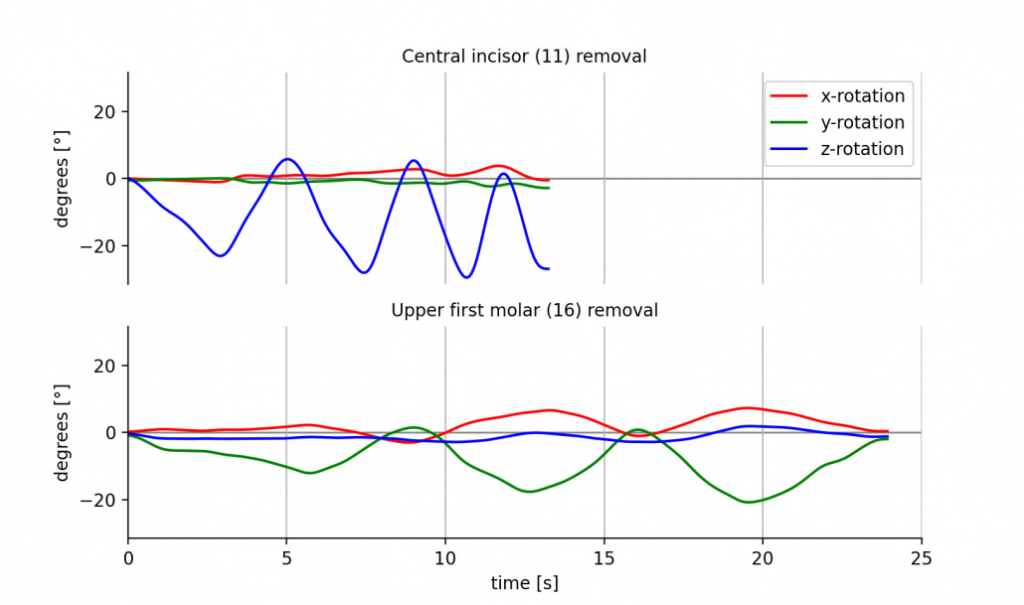
Visualisatie van bewegingsdata. Data opgenomen tijdens het verwijderen van een bovenste centrale snijtand (bovenste grafiek) en een bovenste eerste kies (onderste grafiek). Beweging rond de longitudinale as (blauwe lijn) was het meest dominant bij het verwijderen van een bovenste centrale snijtand. Beweging rond de mesiodistale rotatie (groene lijn) was het meest dominant bij het verwijderen van een bovenste eerste kies. Bij de bovenste eerste kies was de rotatie rond de longitudinale as beperkt in tegenstelling tot de centrale snijtand. X-rotatie = rotatie rond de bucco-palatale of bucco-linguale as. Y-rotatie = rotatie rond de mesiodistale as. Z-rotatie = rotatie rond de longitudinale as.
Maximale rotaties en hoeksnelheden werden berekend voor alle richtingen. Het grootste bewegingsbereik werd gevonden bij rotaties rond de longitudinale as van de tand, vooral in het frontale gebied. Het laagste bereik werd gevonden bij mesiale en distale angulatie, vooral in de bovenkaak. De hoogste hoeksnelheden werden gemeten rond de longitudinale as, meer uitgesproken in de bovenkaak.(7)
Classificatiemodel
Het doel was een verkennend classificatiemodel te bouwen voor tandverwijdering op basis van kracht-, rotatiekracht- en bewegingsdata. Er werden, in meerdere brainstormsessies, 75 variabelen bedacht die een rol konden spelen in de tandextractie. Logistische regressie met L2-regularisatie werd gebruikt voor selectie van de meest relevante variabelen, en er vond standaardisatie van de features plaats. Het Gaussian Naïve Bayes-algoritme werd gekozen vanwege de relatief kleine dataset en hoge heterogeniteit. Accuratesse, precisie, recall en F1-score werden berekend voor elke tandklasse. Een gestratificeerde viervoudige crossvalidatie werd uitgevoerd om het risico op selectiebias te verminderen.(8)
Gemiddeld was de accuratesse 86% in de trainingsset en 54% in de testset. Het model kon in 95% van de experimenten correct bepalen of het om de boven- of onderkaak ging, en in 88% van de gevallen werd de juiste of een naburige klasse correct voorspeld.
Discussie
Dit onderzoek heeft nieuwe inzichten opgeleverd in de krachten en bewegingen tijdens tandverwijdering. Door gebruik te maken van robottechnologie konden we gedetailleerde gegevens verzamelen over de krachten en rotaties die optreden bij verschillende groepen tanden. Deze gegevens zijn essentieel voor de ontwikkeling van betrouwbaar (pre-klinisch) onderwijs.
Ons onderzoeksteam van de TU Delft, het Amsterdam UMC en ACTA werkt samen aan de ontwikkeling van nieuw educatief materiaal voor tandextractie. Er is gekozen voor een stapsgewijze aanpak om verschillende aspecten van het onderwijs te evalueren. In de eerste fase is de meetopstelling aangepast voor educatieve doeleinden (afbeelding 3). De meetopstelling zoals hierboven beschreven is omgebouwd tot een oefenopstelling, geschikt voor zowel plastic modellen als kadaverkaken.(9)
In het curriculum 2022-2023 werden studenten in hun masterfase voor het eerst uitgenodigd voor een volledige onderwijsdag over tandextracties. Ze kregen een lezing, met voorbeelden uit onze dataset, en verwijderden gemiddeld tien plastic modeltanden in de ochtend. ’s Middags kregen ze de gelegenheid om tanden te verwijderen uit vers ingevroren kadaverpreparaten. Het onderwijs werd uitgebreid geëvalueerd met behulp van een vragenlijst, die door onszelf ontwikkeld en gevalideerd is.
Parallel hieraan hebben we verschillende soorten feedbackopties voor de opstelling getest en geëvalueerd. Op dit moment lijkt krachtfeedback de meest haalbare optie.(9) Voor het volgende curriculum (2024-2025) zal daarom een zes-assige force-torque sensor worden geïntegreerd in de huidige opstelling. De bijgewerkte versie van onze opstelling zal ook data kunnen verzamelen voor toekomstige analyses. Opnieuw zal studenten worden gevraagd om de onderwijsmethoden te evalueren. Indien het onderwijs bewezen effectief blijkt en er zijn voldoende gegevens (zowel van studenten als experts) verzameld, zou een volgend doel zijn de behandeling volledig virtueel te simuleren. We geloven dat de combinatie van een verbeterd fundamenteel begrip van de extractieleer, samen met een sterk instrument om het onderwijs te toetsen, ons zal helpen om op zinvol educatief materiaal te ontwikkelen.
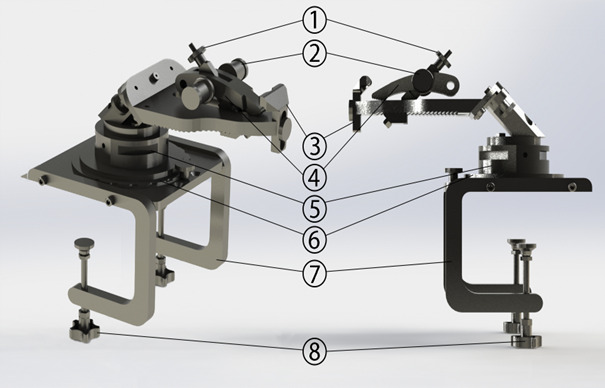
Kaakhouder aangepast voor onderwijs. De kaakhouder kan zowel plastic modellen als kadaverkaken rigide fixeren. (1 t/m 4) fixatie mechanisme, (5) zes graden-van-vrijheid force/torque sensor, (6) roteerbare basis (ergonomie), (7) tafelmontage klauwen, (8) tafelmontage stelschroeven.
Referenties
1. Greive J. Aulus Cornelius Celsus: on medicine. In eight books. Translated with notes critical and explanatory. Book VII. VII. Edinburgh: Dickinson and company; 1814. p. 338.
2. Beuling MG, Agterbos PCG, van Riet TCT, Ho JPTF, de Vries R, Kober J, de Lange J. Forces and movements during tooth extraction: A scoping review. Advances in Oral and Maxillofacial Surgery. 2023;9.
3. Brand HS, van der Cammen CCJ, Roorda SME, Baart JA. Tooth extraction education at dental schools across Europe. BDJ Open. 2015;1:15002-.
4. Onclin P. Recent increase in simple extractions in OMF-surgeries in the Netherlands studied. Nederlands Tijdschrift voor Tandheelkunde. 2016;123(07/08):365-72.
5. van Riet TCT, de Graaf WM, van Antwerpen R, van Frankenhuyzen J, de Lange J, Kober J. Robot Technology in Analyzing Tooth Removal – a Proof of Concept. Annu Int Conf IEEE Eng Med Biol Soc. 2020;2020:4721-7.
6. Riet TCTv. Learning about Tooth Removal with Robot Technology. Amsterdam: University of Amsterdam; 2023.
7. Riet TV, Graaf W, Lange J, Kober J. Analysis of movements in tooth removal procedures using robot technology. PLoS One. 2023;18(5):e0285503.
8. de Graaf WM, van Riet TCT, de Lange J, Kober J. A Multiclass Classification Model for Tooth Removal Procedures. J Dent Res. 2022;101(11):1357-62.
9. Beuling MG, van Riet TCT, van Frankenhuyzen J, Antwerpen RV, de Blocq van Scheltinga B, Dourleijn AHH, et al. Development and testing of a prototype of a dental extraction trainer with real-time feedback on forces, torques, and angular velocity. Annu Int Conf IEEE Eng Med Biol Soc. 2022;2022:3285-90.




{kind=link}