
Er is een toenemende vraag naar robotchirurgie training, maar hoe combineer je dit met continue innovaties? Wat is het gouden recept voor een training? Kunnen we iets leren van de laparoscopie? Is het tijd voor een datagedreven en evidence-based trainingskamp?
Een piloot begint zijn opleiding niet met het vliegen in een jumbojet als de Airbus A380 met 853 passagiers. Een voetballer begint zijn carrière ook niet in de WK-finale. De piloot gaat een uitgebreid traject af met simulatietraining en de voetballer begint ook met dagelijkste trainingen. Beiden ondergaan veel theorie, maar ook veel vaardigheidstraining in een veilig simulatieomgeving. Stap voor stap worden de trainingen ook complexer, van een kleiner vliegtuig naar een grotere, van een lokaal trainingsveld naar een oefeninterland in een stadion. In het begin van de leercurve worden de meeste fouten gemaakt en het idealiter vindt deze fase in een training of simulatie plaats.
Deze analogieën van andere vakgebieden waar vaardigheidstraining cruciaal zijn voor succes, is het bruggetje naar de medische wereld. In veel landen start de chirurg in opleiding in de WK-finale of stijgt op met de Airbus A380, oftewel de operatiekamer. De operatiekamer is een high stakes-omgeving waarbinnen de complexe vaardigheden ten pas komen. Zo ook voor de laparoscopie en de robotchirurgie.
In Nederland is er veel aandacht voor simulatietraining, ontwikkelen van curricula en het toepassen van innovaties. Zo is er sinds de introductie van de laparoscopie een grote slag gemaakt voor laparoscopietrainingen en zijn er ook veel curricula geïmplementeerd. Nu herhaalt de geschiedenis zich, met de toenemende vraag naar robotchirurgie trainingen worden curricula weer vormgegeven. Maar wat houdt het ideale curriculum in? Hoe kunnen alle medisch technologische innovaties worden geïmplementeerd? Hoe ziet het trainingskamp van de chirurg eruit?
De Scheidsrechter en de VAR
In het verleden werd er vooral getraind onder supervisie van de chirurg of op een systeem zonder feedback. Zo ontstond een subjectieve beoordeling. Indien meerdere chirurgen een cursist beoordelen, zullen daar verschillende uitkomsten uit komen. Zo hebben scheidsrechters ook een belangrijke rol op het veld, maar de VAR zorgt voor objectieve data.
De Lapron boxtrainer (Fig 1) is een fysieke boxtrainer, ontwikkeld door de Technische Universiteit Delft en het Amsterdam UMC, die beschikt over een uitgebreid sensor systeem welk feedback geeft op weefselmanipulatie (krachten die worden uitgeoefend in Newtons) en instrumentbehendigheid (padlengte in millimeter en tijd in secondes) [1-3]. Het is een mobiele simulator die chirurgen in opleiding meenemen naar huis om te oefenen. Thuis krijgen de cursisten feedback van de LapRon, maar ook worden de video’s van de repetities opgenomen zodat de laparoscopische experts het proces kunnen monitoren en feedback kunnen geven.
Met de data van de boxtrainer kunnen onderdelen van de cursus worden uitgebreid, veranderd of nieuwe innovaties geïmplementeerd. Doordat de prestaties meetbaars zijn van de cursisten, kunnen ook duidelijke eindpunten afgesproken worden, zogeheten ‘proficiency-levels’. De oefentaken worden eerst door experts uitgevoerd, waarna een gemiddeld niveau bepaald wordt die door de cursist behaald moet worden. Op deze manier is het vereiste niveau voor het behalen van een cursist daadwerkelijk gekwantificeerd, in tegenstelling tot een eendaagse cursus waar iedere deelnemer aan het eind automatisch een certificaat ontvangt. Dit concept waarbij met de data continue wijzigingen en innovaties kunnen worden aangepast zorgt ervoor dat de cursus datagedreven is en evidence-based.
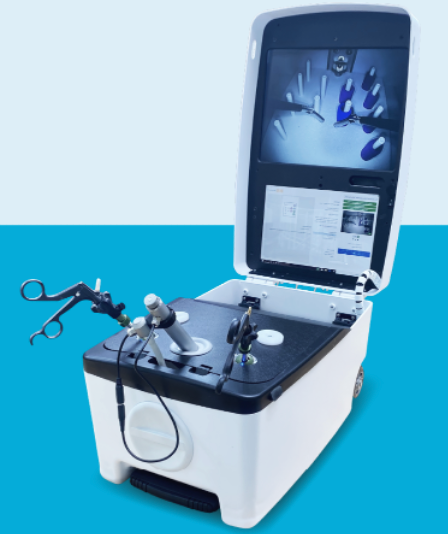
De Lapron Boxtrainer met objectief sensorsysteem
Nieuw en langzaam of oud en snel?
Zodoende is er door de jaren heen veel onderzoek gedaan over leercurves binnen de laparoscopie. Een interessante trend is het verschil tussen de novices en de intermediates, in het bijzonder voor de weefselmanipulatie. Novices zijn beginnende laparoscopisten en intermediates hebben een aantal jaar laparoscopische ervaring. In een studie werd een significant verschil geobserveerd in kracht op het weefsel bij verschillende laparoscopisch oefentaken tussen de novices en intermediates [4-6]. Novices zijn voorzichtiger en hebben meer tijd nodig om een laparoscopische oefentaak te voltooien, maar zijn daardoor wel delicaat met de weefselmanipulatie.
Intermediates daarentegen zijn meer gefocust op het snel en efficiënt voltooien van een oefentaak, wat ten koste gaat van de krachten op het weefsel. Dit brengt risico’s met zich mee tijdens het hechten en manipuleren van weefsel. De experts met veel ervaring presteren zowel goed voor instrumentbewegingen en tijd als voor kracht. Zij hebben krachtparameters die twee keer zo laag zitten als die van de novices en intermediates [4-6].
Dit suggereert dat een groot deel van de leercurve voor het veilig omgaan met weefsel plaatsvindt in de operatiekamer, waar chirurgen weefselmanipulatie leren aan de hand van visuele indicaties bij het uitoefenen van kracht. Zoals weefsel dat beschadigd raakt bij een teveel aan kracht en het correleren met de hoeveelheid van de kracht en de visuele weefselinteractie. Dit benadrukt het simulatie trainen waarbij aandacht bestaat voor feedback op de weefselmanipulatie.
Trainen met zijwieltjes
De feedback parameters van kracht, beweging en tijd zijn erop gericht om de laparoscopische technische vaardigheden te bevorderen zoals bimanuele behendigheid, weefselgevoel, diepteperceptie en hand-oog coördinatie. Aan de hand van een specifieke oefentaken wordt dan ook achteraf feedback gegeven op basis van de parameter resultaten. Verschillende fases gerelateerd aan chirurgische acties, zoals het naald doorhalen, knopen en navigeren tijdens het maken van een hechting, kunnen significant verschillen tussen de laparoscopische novices, intermediates en experts. Hier moet goed op gelet worden tijdens de validatie fase.
Een andere methode voor feedback is real-time feedback. Hierbij krijgt een cursist tijdens het oefenen direct feedback over de uitgevoerde handelingen. Dit kan auditief, visueel of tactiel zijn. In een onderzoek werd in real-time aangegeven op het scherm welke krachten op het weefsel werden uitgeoefend. Hierbij werd gebruikgemaakt van de krachtvectoren en verschillende kleuren afhankelijk van de krachtintensiteit [7-10]. Bij de cursisten was een verbetering van de interactiekrachten te zien en vermindering van de hoeveelheid krachten op het weefsel.
Bij het uitzetten van de visuele feedback was een interessante uitkomst dat de cursisten nog steeds beter presteerden dan cursisten die geen extra visuele feedback hadden gehad. Hoewel deze studies aangaven dat visuele feedback de interactiekracht bij hechtwerkzaamheden vermindert, blijft het onduidelijk of vergelijkbare effecten kunnen worden gevonden met tactiele of auditieve feedback. Een studie uitgevoerd met auditieve krachtfeedback tijdens oogchirurgie concludeerde dat het de chirurg in staat stelt de opgewekte krachten te verminderen met verbeterde precisie tijdens het pellen van een fantoommembraan, ongeacht de chirurgische ervaring.
Robottraining
Net zoals de laparoscopie zijn er verschillende modaliteiten om robotchirurgie op te trainen. De twee grootste zijn virtuele/digitale trainingen en fysieke training met een fantoom of dierlijkweefsel. Een recent onderzoek uitgevoerd met de AdLap VR trainer (Figuur 2 links) concludeerde dat tactiele feedback studenten leert om botsingen te voorkomen (Figuur 2 rechts), zelfs nadat de feedback is uitgeschakeld tijdens de post-test [11].
Extra visuele informatie in het zicht van de trainee is gemakkelijk waar te nemen. Echter, visuele feedback naast het taakgebied [12] kan ook afleiden van de taak of zelfs een deel van het beeld blokkeren wanneer een pijl wordt gebruikt [11]. Dit moet in overweging worden genomen wanneer extra visuele feedback tijdens een operatie wordt gebruikt.
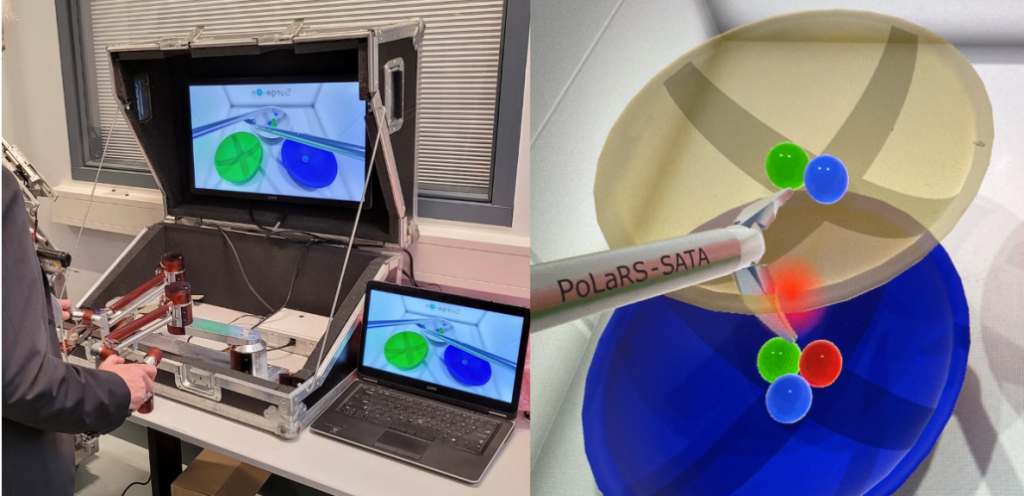
Rechts: een overzicht van het AdLap VR- systeem. Rechts geeft een rood veld rond het botsingsgebied aan dat er contact is tussen het instrument en de omgeving, en tactiele krachtfeedback wordt geleverd door trillingen van de handvatten.
Een echte operatie vereist continue focus van de chirurg, niet alleen op de chirurgische handeling zelf maar ook op de omgeving. Hoewel is vastgesteld dat training met visuele feedback een positieve invloed heeft op krachtparameters en dat de trainingseffecten significant waren, blijft de vraag hoe feedback zorgt voor betere prestaties. Hoewel dit niet is onderzocht, lijkt het erop dat zodra krachtfeedback als beste strategie voor een taak tijdens de training wordt ervaren, deze strategie wordt onthouden en gereproduceerd tijdens de post-test (Figuur 3).
In het geval van hechten [12] betekent dit dat beginners de kromming van de naald in hun voordeel leren gebruiken. In het geval van weefselmanipulatie en plaatsing onder tractie leren beginners het kunstmatige weefsel dicht bij het losse uiteinde vast te pakken in plaats van in het midden voor gemakkelijkere manoeuvreerbaarheid van de verbindingsmiddelen met minder tractie [13]. In het Rasmussen-model [14] helpt de realtime visuele feedback beginners om de juiste strategie te kiezen op een vaardigheids- en kennisniveau door hen te informeren over gevaarlijke krachten op een regel gebaseerd niveau.

Het trainen met visuele en tactiele feedback zorgt ervoor dat ook wanneer de feedback wordt uitgeschakeld de studenten nog steeds minder vaak onnodig contact maken tussen instrumenten en hun omgeving. Dit laat een groei in bewustzijn zien.
De switch naar de robot
Robotchirurgie wordt vaak uitgevoerd door ervaren laparoscopische chirurgen. Deze techniek vereist echter een andere set technische vaardigheden en van chirurgen wordt verwacht dat ze kunnen afwisselen tussen deze benaderingen. In een eerdere studie is gekeken naar de crossover-effecten tussen laparoscopie en robotchirurgie [14]. In totaal werden zestig cursisten verdeeld over novices, intermediates en experts waarbij ieder zes keer een hechting en knoop heeft uitgevoerd middels laparoscopie of robotchirurgie. De startvolgorde werd gerandomiseerd en na de zes hechtingen ging de cursist over op de andere modaliteit, laparoscopie of robot. Wederom werden krachten gemeten en vergeleken. De expertgroep had 46% hogere krachten bij overschakeling van robotchirurgie naar laparoscopie. Bij overschakeling van laparoscopie naar robotchirurgie vertoonden experts een significante afname in bewegingsefficiëntie. Verder onderzoek tussen de zevende en negende poging toonde aan dat de intermediate groep hun krachten met 78% verhoogde bij het overstappen naar de robot.
De crossover-effecten in technische vaardigheden tussen laparoscopische en robotchirurgie [14] zijn sterk afhankelijk van de eerdere ervaring met laparoscopische chirurgie en de gebruikte instrumenten [15]. Waar experts kunnen afwisselen tussen benaderingen zonder beperking van technische vaardigheden, moeten beginners en gevorderden zich bewust zijn van afname in bewegingsefficiëntie en weefselbehandelingsvaardigheden die de veiligheid van de patiënt kunnen beïnvloeden. Daarom wordt aanvullende simulatietraining geadviseerd om ongewenste gebeurtenissen te voorkomen.

Bij het wisselen tussen systemen laten vooral intermidiates en novicen hogere interactiekrachten zien wat de kans op weefselschade representeert. Dit visualiseert goed het risico van beperkte technische vaardigheden tijdens het uitvoeren van een complexere taak.

Het grote verschil in hand interface van robotsystemen maakt dat gebruikers echt goed moeten trainen op alle systemen. Het beheersen van een1 systeem betekent niet dat een ander systeem ook zonder risico in gezet kan worden gedurende een operatie zonder de juiste voorbereiding.
Discussie en de toekomst
Het is van belang om lessen te trekken uit de jarenlange ervaring met het ontwikkelen en implementeren van laparoscopietrainingen. Trainingen moeten datagedreven en evidence-based zijn. Het moet bewezen zijn dat een training werkt, dus ook alle toekomstige toevoegingen en wijzigingen moeten onderzocht worden. Met de data van de trainingen moet gekeken worden naar het optimaliseren van trainingen om de chirurg zo goed mogelijk voor te bereiden op de operatiekamer [14].
Hoe ziet het toekomstige trainingskamp eruit? Idealiter begint de cursist met e-learning en video’s alvorens de cursus te starten. Tijdens de eerste dag van de cursus wordt er getraind met de simulator en robot in een simulatieomgeving waarbij de prestaties objectief beoordeeld worden en waarbij gekwantificeerde eindpunten gebruikt worden. Na de eerste dag begint de leercurve, de cursisten investeren de komende maanden de tijd in het ontwikkelen van de vaardigheden op de robotsimulator. Na het trainen volgt het einde van de cursus, het examen. Tijdens het examen wordt naast de beoordeling van de chirurg ook gebruikgemaakt van een objectieve beoordeling van de prestaties. Zo ontstaat een reproduceerbare training die zich ook wetenschappelijk heeft bewezen. Dit alles met als doel om robotchirurgie zo veilig mogelijk te maken, rekening houdende met de patiënt.

De toekomst van het thuis trainen van (complexe) chirurgische vaardigheden in de geavanceerde laparorsopy. Links: , Studenten die na eenne periode van thuis trainen een examen afleggen op de AdLap. Rechts: de nieuwe generatie van AdLap trainers die nu wordt ontwikkeld voor het thuis trainen van robot vaardigheden vanuit het Amsterdam Skills Center.
Over de auteurs
Dr. Masie Rahimi M.D [1,2,3] Ir, Koen Schouten [4] & Associate Prof. Dr. Tim Horeman-Franse Ir, PhD [2,4].
1. Amsterdam UMC, location Vrije Universiteit, Department of surgery, Amsterdam, the Netherlands
2. Science Hub for ASC Research and Education (SHARE). Amsterdam Skills Centre for Health Sciences (ASC), Amsterdam, The Netherlands
3. Cancer Center Amsterdam, Amsterdam, The Netherlands
4. Faculty of Biomedical Engineering, University of Technology Delft, Mekelweg 2, 2628 CD Delft, The Netherlands




{kind=link}