Rutger van Beek is een van de 25 studenten van Project MARCH: het studententeam van de TU Delft dat een jaar lang werkt aan de bouw van een exoskelet voor dwarslaesie-patiënten. Hij heeft een bachelor Technische Wiskunde afgerond en start volgend jaar aan een master. Rutger is de Data Analist van team 2019-2020, wat inhoudt dat hij alle door het exoskelet gegenereerde data organiseert en analyseert. Het team is constant bezig met nieuw onderzoek om het exoskelet zo veelzijdig en gebruiksvriendelijk mogelijk te maken. Een van deze experimenten is een balancerend exoskelet.
Op dit moment is de drager van het exoskelet, de piloot, namelijk nog afhankelijk van krukken bij het lopen om niet om te vallen. Idealiter zijn deze krukken niet langer nodig en belanceert het exoskelet zichzelf en de gebruiker. Immers, dit zou de piloot minder moeite kosten en het gebruiksgemak vergroten omdat hij of zij dan de handen vrij heeft voor iets anders. Bij Project MARCH doen de studenten dan ook onderzoek naar manieren om dit te bereiken.
Gebalanceerd lopen en balancerende robots
Allereerst dient de vraag zich aan wat wat we verstaan onder ‘in balans zijn’. Is dat hetzelfde als niet omvallen? Vaak wordt gezegd dat iets in balans is als het in evenwicht is; dat het niet verandert zonder externe verstoringen. Zowel bij mensen als bij exoskeletten zou je kunnen stellen dat er sprake is van balans wanneer het massamiddelpunt zich boven het ondersteuningsoppervlak (support polygon) bevindt. Er is dan geen sprake van nettokracht, met stilstand tot gevolg. Bij het exoskelet is de locatie van het massamiddelpunt te meten met behulp van druksensoren in de zolen en krukken. De teamleden van Project MARCH gebruiken hiervoor bijvoorbeeld de pressure soles van IEE sensing (https://www.iee-sensing.com/en). Het middelpunt van de druk (Center of Pressure) bepaalt waar de robot de grond raakt of er een nettokracht is. Een lang bestaande techniek om een tweebenige robot te balanceren is om steeds het middelpunt van deze druk te meten en ervoor te zorgen dat deze in het ondersteuningsoppervlak blijft. Een belangrijk nadeel van deze manier is echter dat de toepassing hiervan resulteert in het zetten van kleine stapjes die meer op schuifelen dan op lopen lijken.
Inmiddels is gebleken dat mensen eigenlijk helemaal niet in balans zijn als ze lopen. In plaats daarvan vallen ze continu naar voren en vangen zichzelf weer op. Een alternatief is dan ook om te zeggen dat iemand gebalanceerd loopt wanneer hij zelfstandig weer in balans kan komen, maar dat dit niet per se continu hoeft te zijn.
Bij het inschatten van de balans en de stabilisatie hiervan speelt het evenwichtsorgaan een belangrijke rol. Dit geldt ook voor dwarslaesie-patiënten, maar zij kunnen niet communiceren met hun benen om een correctie toe te passen wanneer ze uit balans dreigen te raken. Een exoskelet zou hierbij uitkomst kunnen bieden door de gebruiker zelf te laten aangeven of er sprake is van balans en welke eventuele correctie nodig is.
Omdat de huidige manier van input door de gebruiker zich beperkt tot acties als staan, lopen, zitten en traplopen zal het blijven balanceren waarbij razendsnelle communicatie vereist is dus om een nieuwe input-wijze vragen. Een van de vele mogelijkheden waar onderzoekers buiten Project MARCH zich mee bezighouden zijn sensoren op bijvoorbeeld handen en hoofd waarmee de piloot met bewegingen van deze lichaamsdelen input kan geven over de balans.
Balans bij Project MARCH
Er zijn op dit moment al tweebenige robots die gebalanceerd lopen. Een indrukwekkend voorbeeld hiervan is Atlas van Boston Dynamics. Deze robots hebben een soort ingebouwd evenwichtsorgaan. Meestal is dit een IMU (inertial measurement unit, https://www.xsens.com/). Dit is een sensor die bijvoorbeeld ook in een WII-controller of stappenteller zit en die de oriëntatie en de versnellingen van zichzelf meet. Omdat deze sensor inzicht kan geven in de balans van de robot, functioneert hij als een soort evenwichtsorgaan. Er zijn verschillende strategieën om sensor data te gebruiken bij het balanceren van een robot. De strategie waar Project MARCH op dit moment mee bezig is wordt capture point genoemd. Het capture point is een punt op de grond dat bij aanraking met de voet leidt tot complete stilstand. Dit is dus vrij direct gekoppeld aan het eerder genoemde definitie van gebalanceerd lopen als het vermogen om zelfstandig in balans te komen. Variaties op deze methode zijn al getest op vergelijkbare robots[2] en gebruikt voor het helpen van mensen met het houden van balans [3].
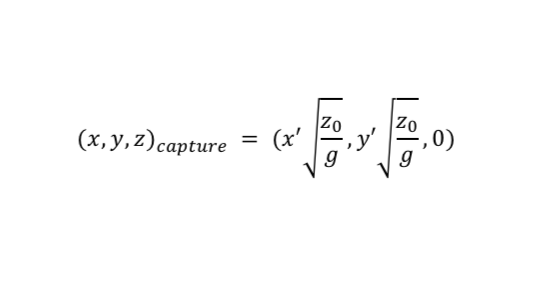
Capture point is afgeleid in [1]. Hierin modelleren de onderzoekers de tweebenige robot als een linear inverted pendulum met een vliegwiel. Ze stellen uiteindelijk de baanenergie gelijk aan 0. Als dan de stabiele eigenvector van dit systeem genomen wordt, resulteert dit in een oplossing die capture point uitdrukt in termen van (de beweging van) het massamiddelpunt (figuur 1).
Hierin zijn z de standaardhoogte van het massamiddelpunt, g de valversnelling en x1 en y1 de snelheden van het massamiddelpunt in de x en y richting. We zien dat capture punt vooral afhangt van de beweging van het massamiddelpunt.
Omdat het exoskelet van Project MARCH acht gewrichten bevat, zijn er veel verschillende manieren om het capture point uiteindelijk te bereiken. Omdat dit goed aansluit op het besturingssysteem, maakt het MARCH-team hiervoor gebruik van bestaande software voor robot motion planning (MoveIt, https://moveit.ros.org/). Hierbij worden beperkingen opgegeven voor de weg naar het capture point – zoals niet door de grond heen kunnen en de limieten van de robot – en vervolgens wordt dit pad berekend.
Op dit moment wordt het exoskelet nog beschouwd als een robot, maar uiteindelijk wordt deze natuurlijk bediend door een mens. Omdat het team niet over de exacte kinematica informatie van de piloot beschikt, zoals bij robots wel het geval is, kunnen de bewegingen van het massamiddelpunt niet exact worden berekend. Dit zou kunnen leiden tot een minder goed resultaat. Wel is er de mogelijkheid dat de piloot meehelpt met het houden van balans door het bewegen van de massa waar hij controle over heeft. Omdat het echter nog niet duidelijk is wat het netto effect hiervan zal zijn, wordt dit momenteel in een simulatie getest.
Het doel van de komende maanden is dan ook om stabiel te kunnen lopen in deze simulatie. Dit zal eerst zonder piloot gebeuren, waarbij eventueel ook nog extra verstoringen worden toegevoegd. Als dit allemaal goed verloopt, zullen de testen vervolgens met de piloot gaan plaatsvinden om te beoordelen of deze methode geschikt is voor het gebalanceerd laten lopen van een exoskelet.
Referenties
[1] Capture point: A step toward humanoid push recovery
Pratt J Carff J Drakunov S Goswami A
Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots, HUMANOIDS
2006 (January) pp: 200-207
[2] Bipedal walking control based on capture point dynamics
Englsberger J Ott C Roa M Albu-Schäffer A Hirzinger G
IEEE International Conference on Intelligent Robots and Systems
2011 pp: 4420-4427
[3] Cooperative control design for robot-assisted balance during gait
Vallery H Bögel A O’Brien C Riener R
At-Automatisierungstechnik
2012 vol: 60 (11) pp: 715-720




{kind=link}