
Chirurgische robotsystemen winnen aanzienlijk aan populariteit in de medische wereld vanwege hun voordelen op het gebied van precisie, comfort en behendigheid voor de chirurg, wat resulteert in een verbeterd chirurgisch resultaat. Deze voordelen gelden voor ziekenhuizen over de hele wereld, maar zijn niet overal even toegankelijk. Complexe systemen vereisen meer onderhoud, meer training voor gebruik, een aanzienlijke hoeveelheid ruimte, een grote financiële investering en ingewikkelde reinigings- en sterilisatieprocessen. Hierdoor is het integreren van deze robotsystemen toch vaak een uitdaging door de beperkte financiën en infrastructuur in kleinere ziekenhuizen.
Dergelijke barricades leiden er vaak toe dat de technologie onbereikbaar wordt in omgevingen die het soms het hardste nodig hebben. De ontwikkeling van goedkope robotsystemen lijkt daarom de sleutel voor minder bedeelde ziekenhuizen om toch toegang te krijgen tot de voordelen die robotchirurgie kent.
Huidige verkoopmodel chirurgische robots
Hoewel de technische mogelijkheden voor het creëren van de meest ideale operatierobot eindeloos lijken, is de aanschaf- en onderhoudsprijs direct gerelateerd aan de mogelijkheden van het systeem. Over het algemeen zijn de kosten die gepaard gaan met de ontwikkeling van een robotsysteem aanzienlijk hoog en kunnen gemakkelijk oplopen tot 100 miljoen dollar voor een eerste systeem dat klaar is voor klinisch gebruik. Intuitive Surgical (ISRG) maakt gebruik van het zogenaamde “scheermes”-bedrijfsmodel dat is gecentreerd rond een robotsysteem dat een continue verkoop van extra, wegwerpbare instrumenten en apparatuur vereist, waardoor een voortdurend inkomstenstroom wordt gecreëerd door gebruik (Collins, 2016). Vervolgens genereert dit model verdere inkomsten via servicecontracten en wegwerpartikelen, waaronder instrumenten die worden gebruikt voor het uitvoeren van chirurgische ingrepen. Mede door de gestelde klimaatdoelen en de algemene bewustwording rond duurzaamheid zijn opkomende marktspelers die alternatieve robotsystemen aanbieden actief op zoek naar manieren om hun systeem als een sterke concurrent in de markt te positioneren. Tot op heden kan slechts één systeem (Senhance, Transenterix) hun technologie voorzien van volledig herbruikbare instrumenten en gebruikt dit actief als verkoopargument voor duurzaamheid. Deze herbruikbare instrumenten zijn echter niet altijd stuurbaar, in tegenstelling tot andere robotsystemen, waardoor ze gedwongen werden af te wijken van het robotmodel om de markt niet te verliezen. Alle andere spelers zoals Hugo, Dexter, CMR volgen nog steeds het vertrouwde “scheermes”-model met het idee dat sommige van hun docking-systemen en instrumenten die nu wegwerpbaar zijn in de toekomst hergebruikt kunnen worden. Uit onderzoek naar implementatie van chirurgische robotica in minder welvarende delen van de wereld wordt echter duidelijk dat de kosten en benodigde faciliteiten om deze systemen operationeel te houden op meer dan één manier omlaag moeten.
Dure instrumenten niet herbruikbaar
Laparoscopische instrumenten niet direct met de hand werden aangestuurd zijn altijd (semi)wegwerpbaar geweest door het gebruik van kabels die de bewegingen van de aandrijfmotoren omzetten in stuurbewegingen van de instrumenttip. In feite zijn de kabel als aandrijf mechanismen zoals ontwikkeld in de begindagen van de robotica nog steeds de standaard ondanks dat robotsystemen kleiner en complexer worden. Deze conventionele aanpak om de instrument bekjes te sturen resulteert in chirurgische
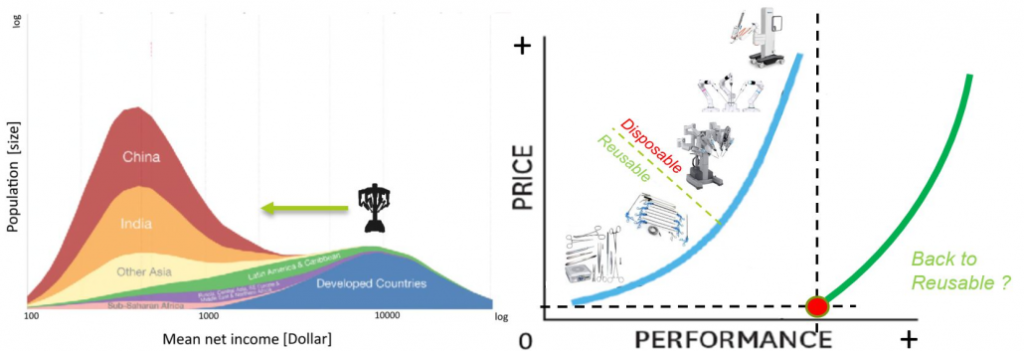
instrumenten die vrijwel onmogelijk te inspecteren zijn in de operatiekamer of centrale steriele afdeling (CSA) en hebben dure apparatuur nodig voor reiniging en onderhoud. Als gevolg hiervan zijn de meeste stuurbare laparoscopische instrumenten maar één maal te gebruiken en worden zo een financiële last voor specialisten die robotchirurgie willen uitvoeren in financieel minder welvarende ziekenhuizen die niet zijn uitgerust met de meest geavanceerde reinigingssystemen in de CSA. In Figuur 1 is te zien dat wanneer gedurende de evolutie van een systeem de verbetering in functionaliteit t.o.v. de kostprijs er gekenden moet worden naar de technologie in het systeem. Daarnaast is er vaak ook een andere ontwerpbenadering nodig om technische innovaties geaccepteerd te krijgen in een ziekenhuis met weinig middelen (Amos & Vijay, 2015). Dit kan worden bereikt door intuïtieve en onderhoudsvriendelijke instrumenten te ontwikkelen voor chirurgen in minder welvarende ziekenhuizen met een eenvoudige CSA en weinig toegang tot training.
Op basis van een nieuwe “bare-minimum design”-methodiek, met een sterke focus op Componenten Interactie Analyse (BMD-CIA) werd een nieuwe Shaft Actuated Tip Articulated (SATA) stuurtechniek ontwikkeld voor de geavanceerde laparoscopie (Horeman et al., 2015). Deze SATA-articulatietechnologie werkt zonder kabels waardoor de binnenruimte van het instrument relatief open is ondanks de kleine diameter. Zo blijft er dus extra ruimte voor additionele componenten die kunnen worden gebruikt voor extra tipfuncties zoals elektrochirurgie, optica of mechanische bot verspaning. In tegenstelling tot de scharnieren in momenteel verkrijgbare instrumenten zoals EndoWrist, AutoSuture, FlexDex en Endo Grasp, kan het SATA-mechanisme worden gedemonteerd voor reiniging en inspectie en heeft het een kleinere buigradius waardoor het ideaal is voor endoscopische procedures in kleine ruimtes zoals gewrichten of holle organen. Deze kabel-loze stuur methode lijkt daarom potentieel interessant voor de introductie van veelzijdigere robotsystemen in minder welvarende ziekenhuizen, maar zou ook schoonmaak en aanschaf kosten kunnen besparen in de meer geavanceerde ziekenhuizen.
Veelzijdige robot systemen voor wereldwijd gebruik
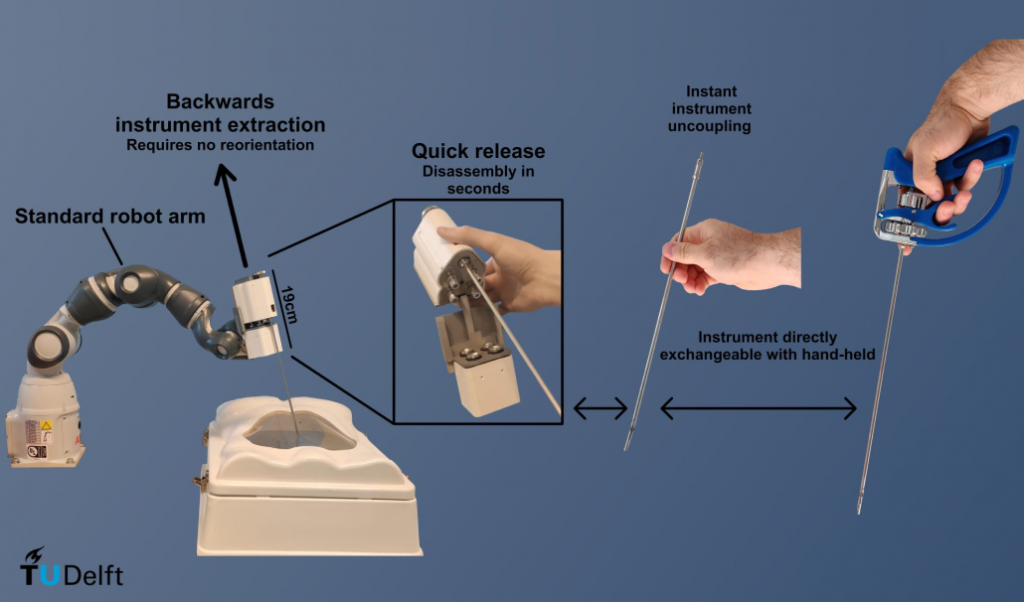
Momenteel wordt gewerkt aan innovatieve modulaire aandrijflijnoplossingen voor de robot chirurgie waarbij het sturende SATA-instrument gemakkelijk gedemonteerd kan worden voor sterilisatie en hergebruik. Door het verminderen van verbruiksartikelen worden zowel de kosten per procedure als het aantal kilo afval per procedure van afval verlaagt. Figuur 2 laat zien hoe instrumentschachten in enkele seconden kunnen worden verwisseld tussen het robotsysteem en de handgreep. Deze aanpak maakt de technologie veelzijdig in gebruik, aangezien de gebruikers nu kunnen kiezen het systeem te configureren als een goedkoper setje handinstrumenten met of zonder geactueerde camerahouder of een volledig bestuurd multi-arm robotsysteem. Hierdoor kan het chirurgisch team tijdens de procedure de opzet gemakkelijk afstemmen op de complexiteit van de chirurgische setting. Daarnaast wordt de Advanced Laparoscopie (Adlap) robot ontwikkeld als een experimenteel modulair platform met open source interfaces. Dit zal gebruikt worden om de experimentele functies op het gebied van training en instrumentinnovatie te bevorderen.
Minder onderdelen
Recente analyse van alternatieve instrumenten en instrument-aandrijfsystemen van de SATA-technologie toont aan dat de wegwerponderdelen kunnen worden teruggebracht tot alleen de tipconstructie (Hardon et al., 2019). In vergelijking met het aantal onderdelen in de schacht en punt van de EndoWrist van Intuitive Surgical zal de SATA-technologie het aantal componenten in het instrument reduceren met 17 onderdelen en ongeveer 20 componenten in de tandwielkast van de aandrijving (Hardon et al. , 2019). Bovendien zouden modulaire systemen zonder kabels de problemen kunnen oplossen die verband houden met slechte reinigbaarheid en het losraken van de structurele integriteit van de kabels die normaal gesproken leiden tot een korte levensduur van het instrument. Los van de financiële impact kan de ontwikkeling van een nieuwe generatie instrumenten die een langere levensduur hebben en minder componenten bevatten een enorme impact hebben op het afvalvolume gerelateerd aan robotchirurgie en een goede stap zijn naar een meer circulaire zorgeconomie. Ongeveer één op de drie laparoscopische operaties (wat naar de 7,5 miljoen procedures per jaar zal gaan in 2025) wordt uitgevoerd met behulp van articulerende instrumenten (Peters et al., 2018) (Blencowe et al., 2018). Als er bijvoorbeeld minimaal drie SATA-instrumenten worden gebruikt per procedure (bijvoorbeeld voor snijden, manipuleren en sluiten) en elk kan 30 keer worden hergebruikt in plaats van de standaard tien, dan zou er potentieel per jaar minimaal 1,5 miljoen instrumenten hergebruikt worden in plaats van weggegooid.
Duurzaam en circulair
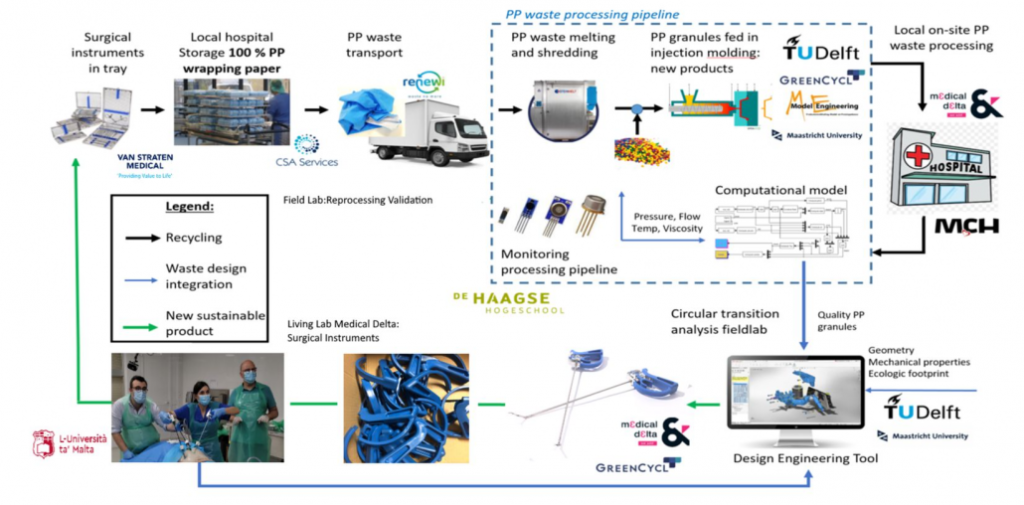
Gecombineerd genereert het afval van alle Nederlandse ziekenhuizen zo’n 11 megaton CO2 per jaar, dat is zo’n 6-8% van de totale CO2-uitstoot. De Europese Klimaatwet bepaalt dat de Europese Unie in 2050 klimaatneutraal is. Om dit doel te bereiken, streeft de klimaatwet naar een vermindering van de CO2-uitstoot met 55% in 2030 (Europees Parlement, 2021) (Rijskoverheid, 2021). Om een meer circulaire economie te bevorderen, wordt verwacht dat ziekenhuizen en de industrie gemotiveerd zullen zijn om te werken aan modellen die afval voorkomen of op een circulaire manier her-verwerken. Het voorbeeld van Figuur 3 laat zien hoe de SATA-technologie ziekenhuisafval gebruikt als basis voor plastic onderdelen in nieuwe geavanceerde laparoscopische (robot)instrumenten (Van Straten et al., 2021). Binnen een nieuw Reprocessing lab (GreenCycl Living labs, de Meern, Nederland) zijn meerdere afvalstromen van meerdere ziekenhuizen geanalyseerd en zijn processen ontwikkeld om PP, ABS, Nylon, PET, ZAMAK en RVS om te zetten in nieuwe onderdelen voor medische en niet-medische hulpmiddelen. Met dit nieuwe initiatief kunnen ziekenhuizen leverancier worden van hun eigen medische hulpmiddelen gemaakt van hun eigen afval.
Referenties
- Amodeo, A., Linares Quevedo, A., Joseph, J. V., Belgrano, E., & Patel, H. R. (2009). Robotic laparoscopic surgery: cost and training. Minerva Urologica e Nefrologica.
- Amos, W., & Vijay, G. (2015, August). Engineering Reverse Innovations: Principles for Creating Successful Products for Emerging Markets. Harvard Business Review, 80-89.
- Blencowe, N., Waldon, R., & Vipond, M. (2018). Management of patients after laparoscopic procedures. BMJ. https://doi.org/10.1136/bmj.k120
- Buettner, R., Renner, A., & Boos, A. (2020). A Systematic Literature Review of Research in the Surgical Field of Medical Robotics. Proceedings – 2020 IEEE 44th Annual Computers, Software, and Applications Conference, COMPSAC 2020. https://doi.org/10.1109/COMPSAC48688.2020.0-200
- Collins, S. (2016, May 30). What Does Intuitive Surgical’s Business Model Look Like? Market Realist, p. 1.
- Davies, B. (2015). Robotic Surgery – A Personal View of the Past, Present and Future. International Journal of Advanced Robotic Systems. https://doi.org/10.5772/60118
- Hardon, S., Schilder, F., Bonjer, J., Dankelman, J., & Horeman, T. (2019). A new modular mechanism that allows full detachability and cleaning of steerable laparoscopic instruments. Surgical Endoscopy. https://doi.org/10.1007/s00464-019-06849-0
- Horeman, T., Schilder, F., Aguirre, M., Kerkhof, G., & Tuijthof, G. (2015). Design and Preliminary Evaluation of a Stiff Steerable Cutter for Arthroscopic Procedures. Journal of Medical Devices. https://doi.org/10.1115/1.4030506
- Peters, B., Armijo, P., Krause, C., Choudhury, S., & Oleynikov, D. (2018). Review of emerging surgical robotic technology. Surgical Endoscopy. https://doi.org/10.1007/s00464-018-6079-2
- Rijskoverheid. (2021). Klimaatverandering/Klimaatbeleid.
- The European Parliament. (2021). European Climate Law.
- Trung, A., Geller, D., Sukato, D., Sabbaghian, S., Tohme, S., Steel, J., Marsh, W., Reddy, S., & Bartlett, D. (2014). Robotic versus laparoscopic hepatectomy: A matched comparison. Annals of Surgery. https://doi.org/10.1097/SLA.0000000000000250
- Van Straten, B., Van der Heiden, D., Robertson, D., Riekwel, D., Jansen, F., Van der Elst, M., & Horeman, T. (2021). Surgical waste reprocessing: Injection molding using recycled blue wrapping paper from the operating room. Journal of Cleaner Production. https://doi.org/10.1016/j.jclepro.2021.129121




{kind=link}