



































Waarom is lopen en balans zo interessant? Het lopen en houden van balans zijn twee belangrijke aspecten van het lichamelijk functioneren. Hier hoeven we in het dagelijks leven heel weinig over na te denken. In situaties waar de grond glad (zoals door vorst) of instabiel is (zoals in de bergen, of in een bewegende trein) moeten we af en toe nadenken over het plaatsen van onze voeten. Maar normaal gesproken is dat bij gezonde mensen niet nodig. In het geval van mensen met neurologische of orthopedische aandoeningen, is het echter een ander verhaal. Deze mensen moeten vaak wel bewust over hun voetplaatsing nadenken, en hebben hierdoor in het dagelijks leven meer moeite met het lopen en het houden van hun balans.
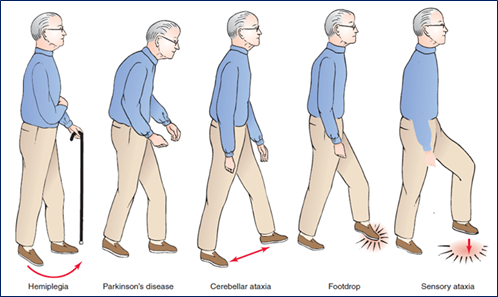
Voorbeelden van neurologische aandoeningen zijn een beroerte, cerebrale parese, (traumatisch) hersenletsel, ziekte van Parkinson, multiple sclerose, etc. Vaak lijden mensen met deze aandoeningen aan verminderd uithoudingsvermogen, loopstoornissen, verminderde flexibiliteit van beweging en een asymmetrisch looppatroon. In Figuur 1 zijn diverse loopstoornissen te zien. Voorbeelden van orthopedische aandoeningen zijn gewrichtsafwijkingen, slijtage (artrose), botontkalking (osteoporose), verkromming van de rug en beenlengteverschil. Mensen met deze aandoeningen lijden veelal aan pijn in de gewichten, een asymmetrische looppatroon en stijfheid in de gewrichten. Deze combinatie kan zorgen voor een verminderd actieve levensstijl en secundaire problemen. Problemen met lopen en het houden van balans ontstaan vaak ook op oude leeftijd en kan tot een verhoogd valrisico en een verminderd zelfvertrouwen leiden. De eerder genoemde aandoeningen maken het lastig voor mensen om te lopen in instabiele omgevingen zoals op het strand of in een drukke winkelstraat, waar ze hun looppatroon moeten aanpassen.
Het meten van loop- en balansproblemen met geavanceerde technologie
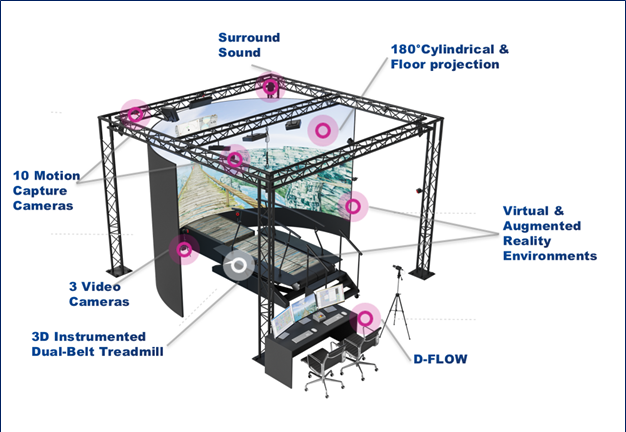
Balans- en loopproblemen kunnen gemeten worden met simpele tests, zoals de Timed Up & Go test (TUG), de 10 meter looptest, de 6 minuten looptest of de Berg Balance Scale (BBS). Deze maten geven een algemeen beeld van de loopcapaciteit en het algemene functioneren van de patiënt. Echter is het vaak wenselijk om een meer gedetailleerd beeld van het looppatroon te krijgen. Dit kan door middel van zogenoemde ‘instrumented gait analysis’: het nauwkeurig meten van het looppatroon met behulp van technologie zoals sensoren, markers en krachtplaten. Vaak vinden deze gangbeeldanalyses (GBA) plaats in een groot lab met meerdere 3D motion capture camera’s en één of meer krachtplaten in de grond waar de proefpersonen overheen moeten lopen. Motek Medical B.V. biedt een alternatief aan, namelijk de GRAIL (Figuur 2). Dit systeem bevat een split-belt geïnstrumenteerde loopband, tien motion capture camera’s (voor het registreren van de markerposities op de huid), drie 2D video camera’s en een 180° halfrond scherm waarop een virtuele omgeving geprojecteerd kan worden. De split-belt geïnstrumenteerde loopband kan de grondreactiekrachten van de rechter- en linkervoet apart meten, wat belangrijk is voor het doen van loopanalyses. Bovendien kan de snelheid van de linker en de rechter loopband apart ingesteld worden. De loopband heeft dynamische pitch en sway functionaliteit, wat betekent dat mensen ook met een helling kunnen lopen (pitch) en een zijwaartse verstoring kunnen krijgen (sway). Hiermee kunnen uitdagende omstandigheden gecreëerd tijdens lopen. De virtuele omgevingen die geprojecteerde worden op het scherm geven de mogelijkheid om dual-task scenarios en andere uitdagingen toe te voegen. Alle meetapparatuur is geïntegreerd en kan aangestuurd worden met Motek’s D-Flow software.
Wereldwijd wordt er steeds vaker loop- en balansonderzoek gedaan met geïnstrumenteerde loopbanden zoals de GRAIL of de varianten M-Gait (Figuur 3) en CAREN (Figuur 4). Het is hierbij wel belangrijk om te weten wat de overeenkomsten en verschillen zijn tussen het lopen op deze loopbanden en het lopen in een traditioneel looplab (ofwel “overground looplab”). Meerdere onderzoekers hebben deze vraag onderzocht om de validiteit van gangbeeldanalyse op een loopband vast te leggen. Een van deze studies van Gates et al. (2012) vergelijkt het looppatroon van het lopen in een overground looplab met het lopen op de loopband bij mensen met onderbeenamputatie en een gezonde controlegroep [1]. Tijdens het lopen op de loopband werd de bewegingssnelheid van de virtuele omgeving gekoppeld met de snelheid van de loopband. Deze studie laat zien dat zowel de mensen met een amputatie als de mensen van de controlegroep met een verkorte staptijd (hogere stap frequentie) liepen, en dat de controlegroep met een verkorte staplengte liep. Er werden echter vrij kleine verschillen gevonden in de gewrichtshoeken en variabiliteit van de gewrichtshoeken. De auteurs concludeerden dat het lopen op een loopband met een bewegende virtuele omgeving redelijk vergelijkbaar is met lopen over de grond, en dat op basis de resultaten van het onderzoek loopbandtraining ingezet kan worden voor het verbeteren van het lopen.
 Figuur 3: M-Gait systeem van Motek Medical B.V.
Figuur 3: M-Gait systeem van Motek Medical B.V.

Daarnaast heeft Van der Krogt M.M. et al. (2014) de verschillen in het looppatroon onderzocht tussen het lopen in een overground looplab en het lopen op een geïnstrumenteerde loopband in een virtuele omgeving bij kinderen met en zonder een cerebrale parese [2]. In deze studie mochten de kinderen ‘self-paced mode’ op de loopband gebruiken. Deze ‘self-paced mode’ is ingebouwd in de GRAIL en betekent dat de gebruiker de snelheid van de loopband zelf bepaalt doordat de loopband reageert op de positie en beweging van de gebruiker. De kinderen die deelname aan het onderzoek liepen in drie verschillende omgevingen: in het overground looplab, op de GRAIL en in de gang (niet in een lab omgeving). Uit het onderzoek blijkt dat de kinderen op de loopband met bredere stappen liepen in vergelijking met in het overground looplab en in de gang. Bovendien waren er ook verschillen in de gewrichtshoeken gevonden. Deze waren echter redelijk klein, hoewel statistisch significant. Van der Krogt M.M. et al. (2015) hebben ook verschillen in kinetica (gewrichtsmomenten en -krachten) onderzocht [3]. Ze concludeerden dat er belangrijke verschillen bestaan tussen het lopen op een loopband en op de grond, en dat loopband-specifieke referentie data moet gebruikt worden voor de interpretatie van loopanalyses op een loopband.
Een recentelijk gepubliceerd artikel vergelijkt spatio-temporele parameters tijdens self-paced lopen op de GRAIL met spatio-temporele parameters tijdens het lopen op de grond bij patiënten na een beroerte (Van Bladel A. et al. (2022)) [4]. Ze vonden dat patiënten langzamer liepen op de loopband dan op de grond, met als gevolg verschillen in spatio-temporele parameters. Ondanks dit resultaat wordt er geconcludeerd dat een geïnstrumenteerde loopband waardevol kan zijn voor gangbeeldanalyses in patiënten met beroerte.
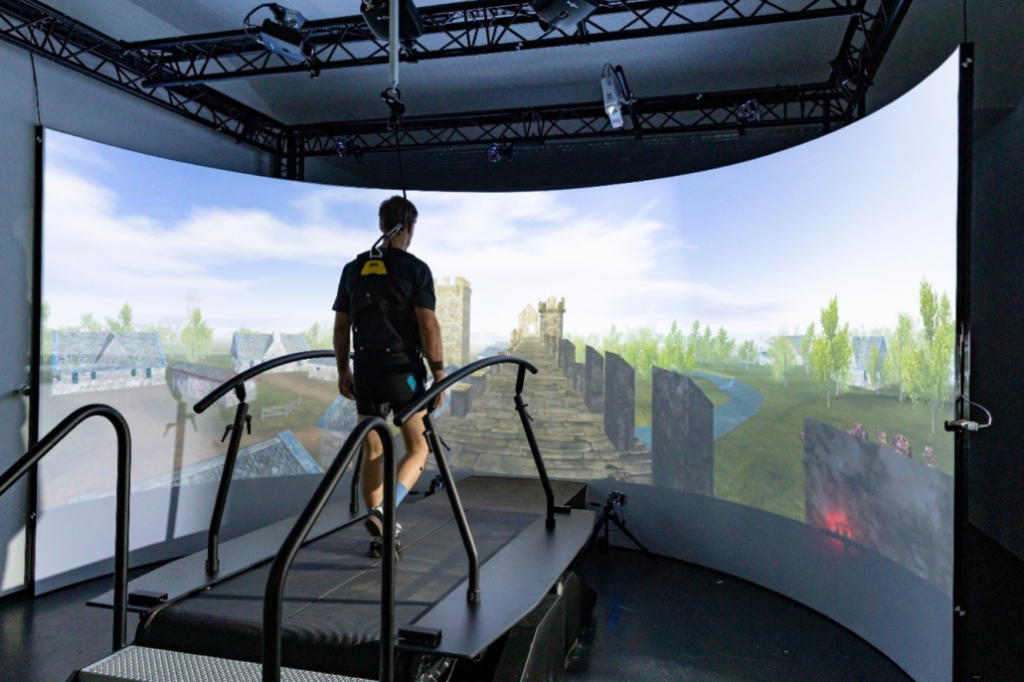
Op de GRAIL of CAREN systemen kunnen patiënten in verschillende virtuele omgevingen lopen, zoals in een bos of op een kasteelmuur (Figuur 5). Uit onderzoek van Sloot et al. (2014) blijkt dat het toevoegen van de virtuele omgeving een klein effect heeft op gewrichtshoeken, gewrichtsmomenten en spatio-temporele parameters [5]. Echter vonden de proefpersonen het lopen in een virtuele omgeving vergelijkbaarder met het lopen op de grond ten opzichte van het lopen op een loopband zonder een virtuele omgeving.
Training bij loop- en balansproblemen met een virtuele omgeving
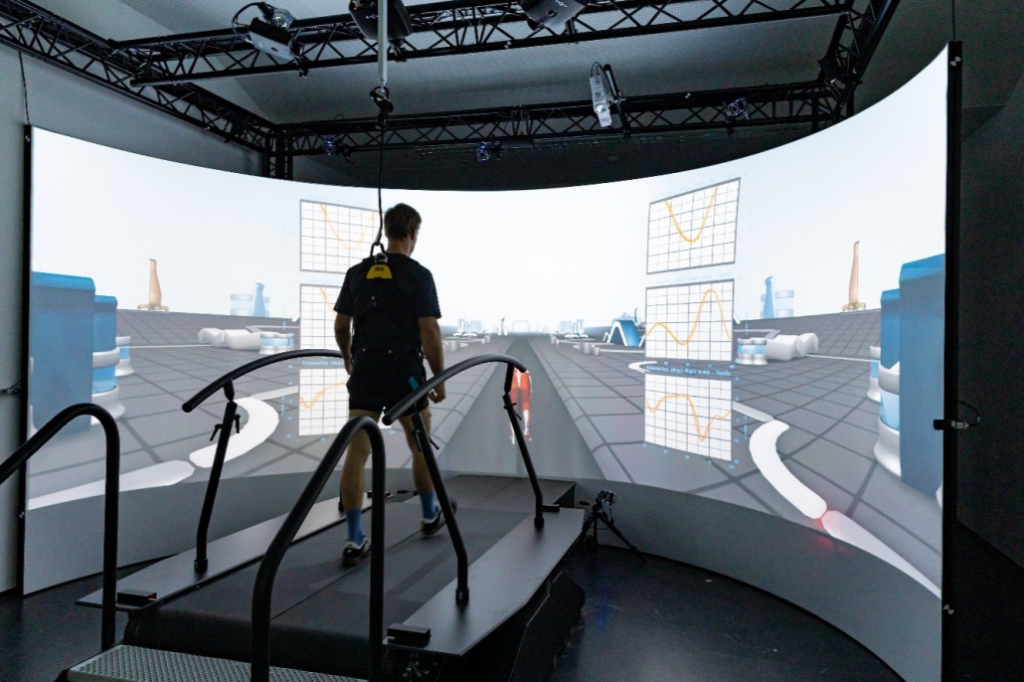
De virtuele omgeving van de GRAIL en CAREN biedt ook de mogelijkheid om feedback van verschillende aspecten van het looppatroon te laten zien aan de patiënt terwijl de patiënt op de loopband loopt (e.g. Darter B.J. et al. (2011) [6], van Gelder L. et al. (2017) [7], Richards R. et al .(2018) [8], Booth A.T.C. et al. (2018) [9], Booth A.T.C. et al. (2016) [10], Mousavi S.H. et al. (2021) [11], Russel Esposito E. et al. (2017) [12]). Een voorbeeld van het presenteren van feedback tijdens het lopen is te zien in Figuur 6. Deze feedback kan worden gebruikt om de patiënt te trainen om zijn of haar looppatroon te verbeteren. Voorbeelden zijn:
- Het gebruiken van feedback op voet progressie hoek om de belasting in de knie te verlagen in mensen met knieartrose (Richards R. et al. (2018)) [8]
- Het gebruiken van feedback op staplengte, kniehoek of enkelvermogen (power) om het looppatroon te verbeteren in kinderen met cerebrale parese (Booth A.T.C. et al. (2018)) [9]
- Het gebruiken van feedback op spieractiviteit en/of het lichaamszwaartepunt om de metabolische vraag te verlagen bij mensen met een onderbeen amputatie (Russell Esposito E. et al. (2017)) [12]
- Het gebruiken van feedback op de beweging van het lichaam en specifiek de beweging van het bekken tijdens het lopen om het looppatroon te verbeteren bij mensen met een bovenbeen amputatie (Darter B.J. et al. (2011)) [6].
Daarnaast worden de GRAIL en CAREN vaak gebruikt voor het verbeteren van het evenwicht en het looppatroon in verschillende groepen mensen, gebruikmakend van doelgerichte applicaties. Een voorbeeld is een applicatie gericht op het verbeteren van gecoördineerd stappen op de plaats of een applicatie gericht op het lopen terwijl de patiënt een secundaire (cognitieve) taak uitvoert. Figuur 7 toont een patiënt die in een virtueel bos loopt terwijl ze ook haar armen moeten bewegen om te interacteren met objecten op het scherm.
De effectiviteit van het trainen met een virtuele omgeving op de GRAIL of CAREN is in verschillende studies onderzocht, waaronder in het onderzoek van Salvatore Calabrò R. et al. (2020) [13] waar de effecten van conventionele therapie en CAREN therapie in patiënten met Parkinson met elkaar werden vergeleken. Na zowel conventionele therapie als CAREN therapie werden verbeteringen in het looppatroon gemeten, maar de verbeteringen na CAREN therapie waren groter dan de verbeteringen na conventionele therapie. De auteurs concluderen dat therapie op de CAREN een effectieve methode is om Parkinson patiënten met loop- en balansproblemen te trainen.

Conclusie
Met geavanceerde technologie zijn we in staat om nauwkeurig loop- en balansproblemen te onderzoeken. Uit diverse onderzoeken is gebleken dat geïnstrumenteerde loopbanden zoals de GRAIL effectief zijn om loopanalyses mee te doen. Het lopen op deze loopbanden wordt zo natuurlijk mogelijk gemaakt door gebruik te maken van een virtuele omgeving die meebeweegt met de snelheid van de loopband, en doordat de persoon zelf de loopsnelheid bepaalt met de ‘self-paced mode’. Daarnaast wordt deze technologie gebruikt om patiënten met loop- en balansproblemen te trainen. Er zijn al een aantal onderzoeken gepubliceerd die de effectiviteit aantonen van deze methode, maar er zijn nog meer onderzoeken en ontwikkelingen nodig voordat deze geavanceerde technologie de nieuwe gouden standaard wordt in de revalidatie.
Auteurs: Rosie Richards en Merel Trossel
De auteurs zijn werkzaam bij Motek Medical B.V
Referenties
- Gates DH, Darter BJ, Dingwell JB, Wilken JM. Comparison of walking overground and in a Computer Assisted Rehabilitation Environment (CAREN) in individuals with and without transtibial amputation. J Neuroeng Rehabil. 2012;9:81. doi:10.1186/1743-0003-9-81
- van der Krogt MM, Sloot LH, Harlaar J. Overground versus self-paced treadmill walking in a virtual environment in children with cerebral palsy. Gait Posture. 2014;40(4):587-593. doi:10.1016/j.gaitpost.2014.07.003
- van der Krogt MM, Sloot LH, Buizer AI, Harlaar J. Kinetic comparison of walking on a treadmill versus over ground in children with cerebral palsy. J Biomech. 2015;48(13):3586-3592. doi:10.1016/j.jbiomech.2015.07.046
- Van Bladel A, De Ridder R, Palmans T, Van der Looven R, Cambier D. Comparing spatiotemporal gait parameters between overground walking and self-paced treadmill walking in persons after stroke. Disabil Rehabil. March 2022:1-6. doi:10.1080/09638288.2022.2046875
- Sloot LH, van der Krogt MM, Harlaar J. Effects of adding a virtual reality environment to different modes of treadmill walking. Gait Posture. 2014;39(3):939-945. doi:10.1016/j.gaitpost.2013.12.005
- Darter BJ, Wilken JM. Gait training with virtual reality-based real-time feedback: improving gait performance following transfemoral amputation. Phys Ther. 2011;91(9):1385-1394. doi:10.2522/ptj.20100360
- van Gelder L, Booth ATC, van de Port I, Buizer AI, Harlaar J, van der Krogt MM. Real-time feedback to improve gait in children with cerebral palsy. 52:76-82. doi:10.1016/j.gaitpost.2016.11.021
- Richards R, van den Noort JC, van der Esch M, Booij MJ, Harlaar J. Gait retraining using real-time feedback in patients with medial knee osteoarthritis: Feasibility and effects of a six-week gait training program. Knee. 2018;25(5):814-824. doi:10.1016/j.knee.2018.05.014
- Booth AT, Buizer AI, Harlaar J, Steenbrink F, van der Krogt MM. Immediate Effects of Immersive Biofeedback on Gait in Children With Cerebral Palsy. Arch Phys Med Rehabil. November 2018. doi:10.1016/J.APMR.2018.10.013
- Booth A, Steenbrink F, Buizer A, Harlaar J, van der Krogt M. Is avatar based real-time visual feedback a feasible method to alter gait parameters of interest? Gait Posture. 2016;49:98. doi:10.1016/j.gaitpost.2016.07.154
- Mousavi SH, van Kouwenhove L, Rajabi R, Zwerver J, Hijmans JM. The effect of changing foot progression angle using real-time visual feedback on rearfoot eversion during running. PLoS One. 2021;16(2):e0246425. https://doi.org/10.1371/journal.pone.0246425.
- Russell Esposito E, Choi HS, Darter BJ, Wilken JM. Can real-time visual feedback during gait retraining reduce metabolic demand for individuals with transtibial amputation? Grabowski A, ed. PLoS One. 2017;12(2):e0171786. doi:10.1371/journal.pone.0171786
- Calabrò RS, Naro A, Cimino V, et al. Improving motor performance in Parkinson’s disease: a preliminary study on the promising use of the computer assisted virtual reality environment (CAREN). Neurol Sci. 2020;41(4):933-941. doi:10.1007/s10072-019-04194-7

{kind=link}